Note
Rockwell Automation PLCs have the first four bytes consumed by a device defined as
status information. This behavior is specific to devices from Rockwell Automation and is
not defined in the EtherNet/IP specification. However, since all known PLCs are
implemented this way, the Micro Motion EtherNet/IP Module adopts this behavior and
strips off the corresponding four bytes from the consumed data.
B.2.4 Port Object, Class F4h
Supported services
Class services:
• Get Attribute Single
• Get Attribute All
Instance services:
• Get Attribute Single
• Get Attribute All
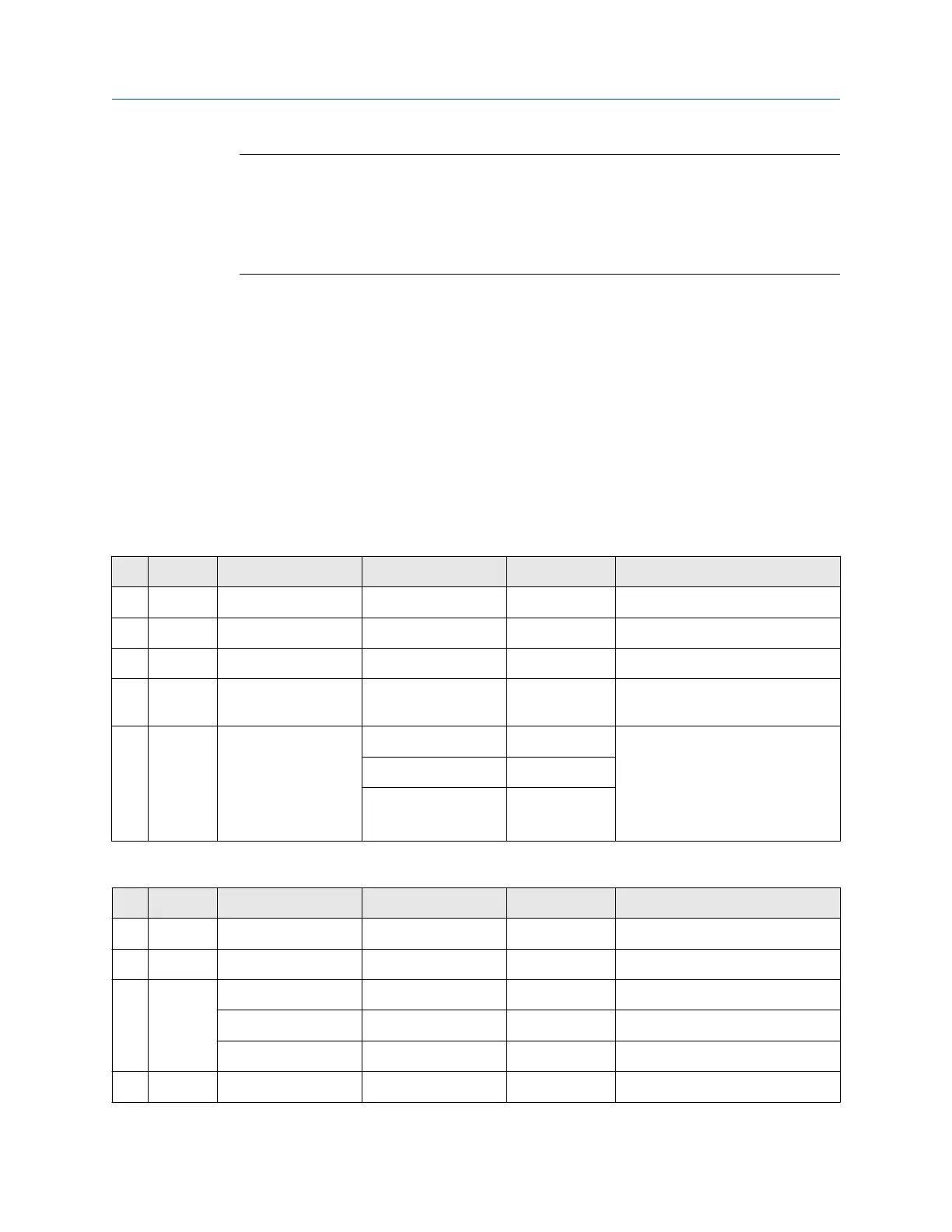
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0001h Revision 1
2 Get Max Instance UINT 0002h 2 is the highest instance number
3 Get No. of instances UINT 0001h 1 instance is implemented
8 Get Entry Port UINT 0002h Returns the instance of the Port
object that describes the port.
9 Get All Ports Array of STRUCT 0000h 0000h Array of structure containing
attributes 1 and 2 from each
instance. Instance 1 is at byte offset
4. Instance 2 is at byte offset 8, etc.
The 4 bytes at offset 0 shall be 0.
(Default)
{UINT; UINT;} 0000h 0000h
0004h 0002h
Instance attributes, Instance 02h
#
Access Name Type Value Comments
1 Get Port Type UINT 0000h TCP/IP
2 Get Port Number UINT 0002h Port 2
3 Get Port Object Struct of:
Path Size UINT 0002h -
Path Padded EPATH 20 F5 24 01h TCP class, Instance 1
4 Get Port Name SHORT_STRING “TCP/IP” Name of port
User Guide Device profile
MMI-20019808 January 2019
User Guide 39