19. Calibration
242 VT Rev.1
Also, pay attention to the following points at the encoder initialization.
CAUTION
■
Joint #4 have no mechanical stops and they may be rotated more than 360
degrees. If the encoder initialization is performed with
Manipulator moves outside the operation range. If the Manipulator was moved
outside the operation range, the internal wiring may be damaged by being twisted
or pinched and it may result in Manipulator malfunction.
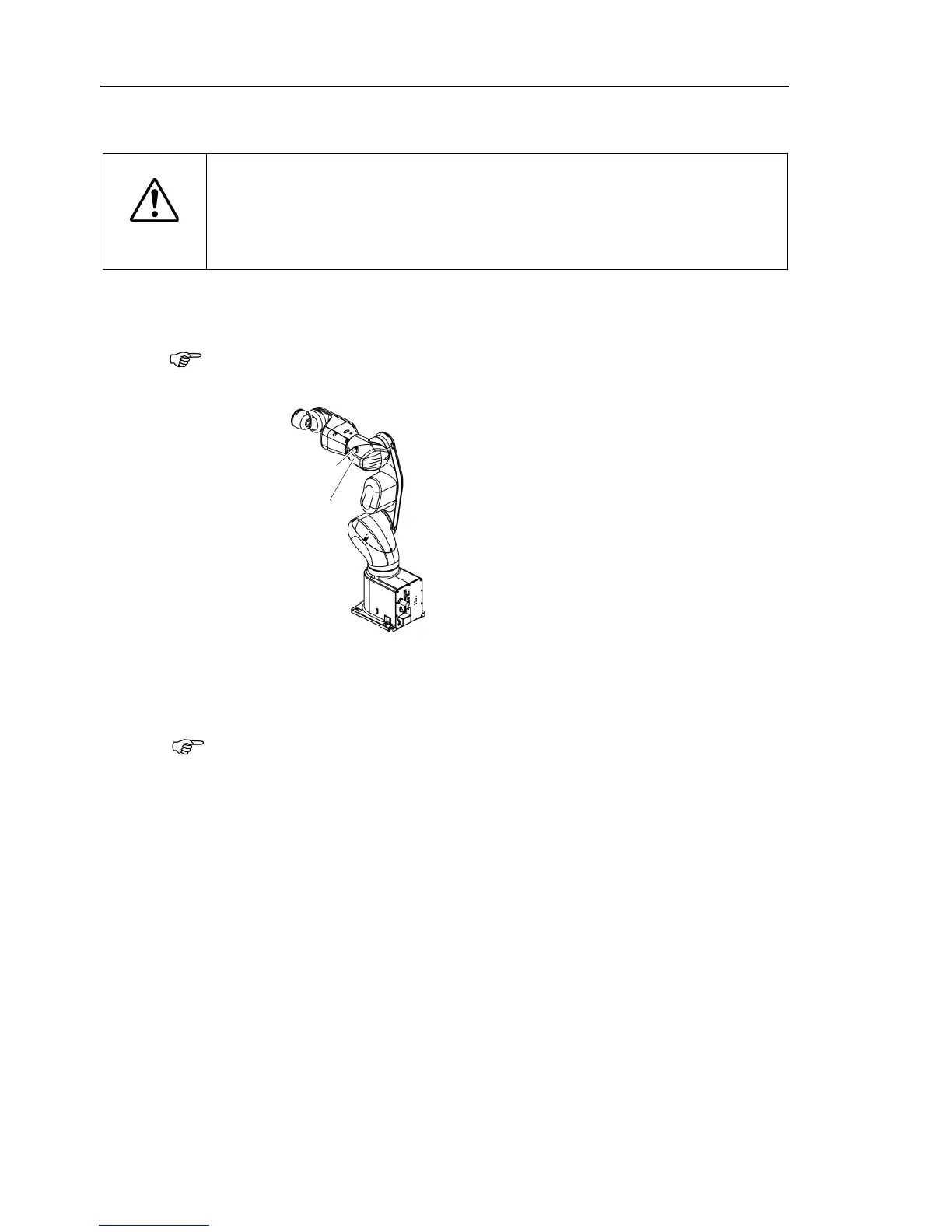
origin position of the Joint #4 is uncertain, check torsion of the internal cables.
origin position is where the Manipulator has the internal cables not twisted at the
described in Setup & Operation 3.9 Checking the Basic orientation.
Torsion of the internal cables can be checked by removing the following cover.
For details on Jog & Teach, refer to the following manual.
EPSON RC+ User’s Guide
5.11.1 [Tools]-[Robot Manager]-[Jog and Teach] Page
- For details about the basic orientation, refer to Setup & Operation 3.9 Checking the
Basic orientation.
- Calibrate one joint at a time. (Also, replace parts of one joint at a time.) If you
calibrate the origins for multiple joints simultaneously, it will be more difficult to verify
their origins and obtain the origin correct positions.

 Loading...
Loading...






