Safety standard
CE Mark
EMC Directive, Machinery Directive
ANSI/RIA R15.06-2012
NFPA 79 (2007 Edition)
*1: Mounting types other than “Table Top mounting”, “Ceiling mounting”, and “Wall mounting” are out of
specification. If you prefer other mounting types, please contact us.
*2: In case of PTP control
*3: Do not apply the load exceeding the maximum payload.
*4: If the center of gravity is at the center of each arm. If the center of gravity is not at the center of each
arm, set the eccentric quantity using INERTIA command.
*5: For details of the environmental requirements, refer to the Setup & Operation 3.1 Environmental
Conditions.
*6: Conditions of Manipulator at measurement are as follows:
Operating conditions: Under rated load, all arms simultaneous motion, maximum speed, maximum
acceleration, VT6L: duty 50%
Measurement point: 1000 mm apart from the rear of Manipulator
*7: In general use, Accel setting 100 is the optimum setting that maintains the balance of acceleration and
vibration when positioning. Although values larger than 100 can be set to Accel, it is recommended to
minimize the use of large values to necessary motions since operating the manipulator continuously with
the large Accel setting may shorten the product life remarkably.
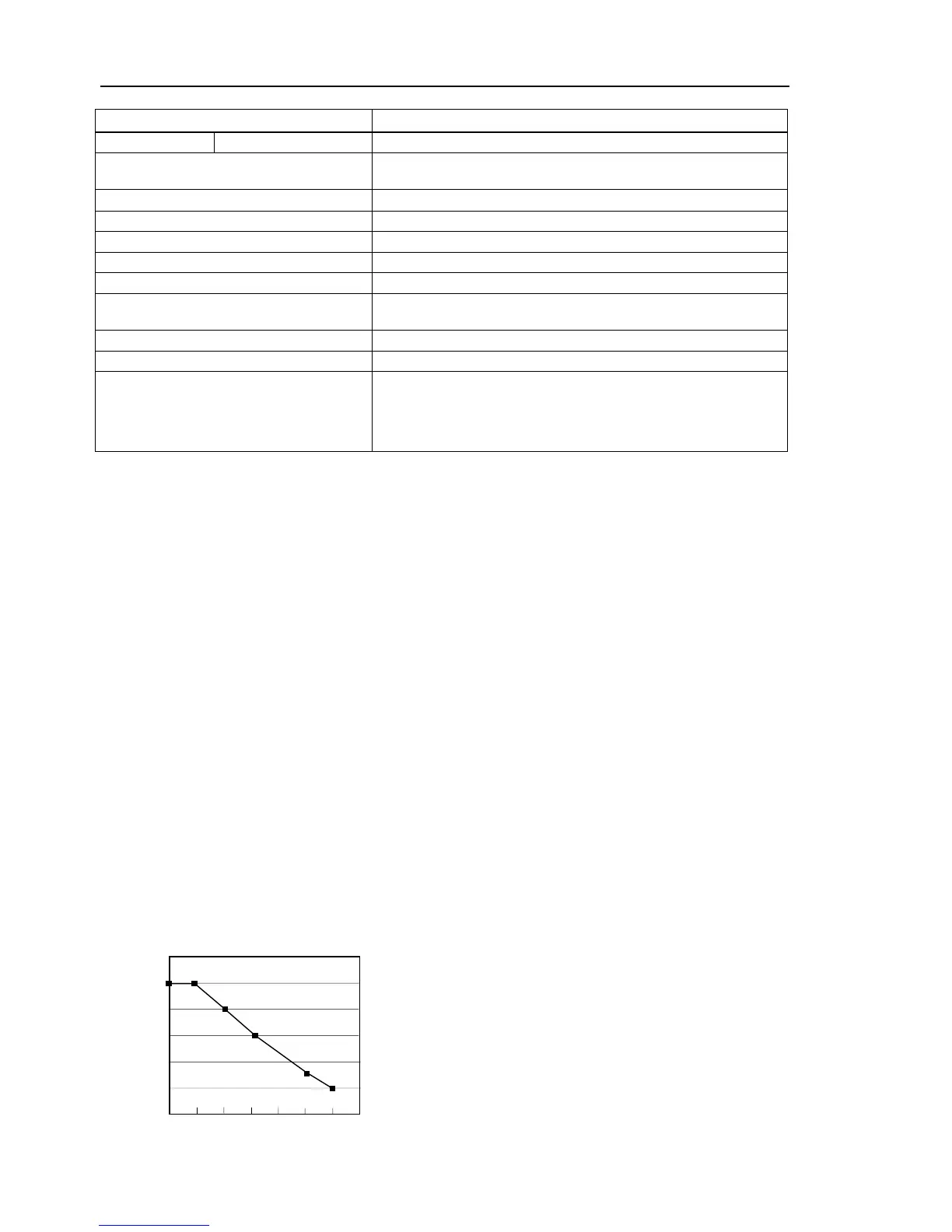
*8: Maximum AccelS setting value varies depending on the load. Refer to the table below for details.
Setting the value which exceeds the maximum AccelS causes an error. In such a case, check the setting
value.
Maximum AccelS setting value