www.fastech.co.kr
*1 Values[pulse] of parameter ‘Pos Tracking Limit[No.27]
*2 70V : EzS-NDR-20, EzS-NDR-28, EzS-NDR-42, EzS-NDR-56, EzS-NDR-60 model
90V : EzS-NDR-86 model
*3 20V : EzS-NDR-20, EzS-NDR-28, EzS-NDR-42, EzS-NDR-56, EzS-NDR-60 model
40V : EzS-NDR-86 model
*5 Values[pulse] of parameter ‘Pos. Error Overflow Limit[No.33]
4) ‘PT ACK’and ‘PT End’Output
‘PT ACK’ and ‘PT End’ signals are available only when the motion is executed by
position table. When PT ACK signal is set to ON and PT End signal is set to OFF, all
motion loops are finished. Then PT ACK signal becomes OFF and PT End signal becomes ON.
If the ‘Wait time’ value in PT item is not 0, the defined time is needed to PT End
signal becomes ON.
Refer to 「Ezi-SERVO Plus-R User Manual – ‘Position Table Function’」.
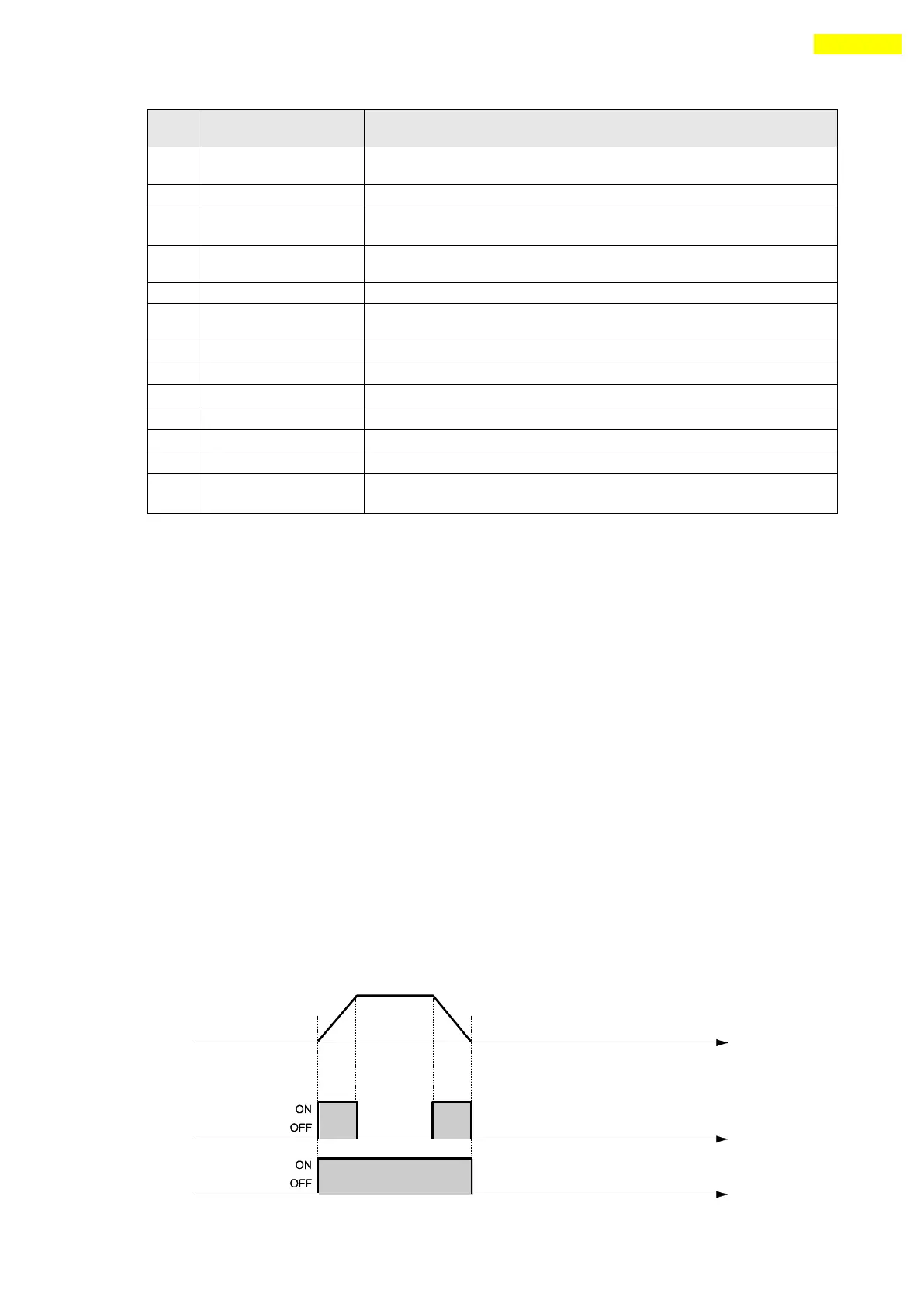
5) ‘Moving’and ‘Acc/Dec’Output
As shown below, the position starts to move by motion command, and Moving signal becomes
ON and Acc/Dec signal becomes ON in the acceleration and deceleration section only.
The current through power devices in inverter exceeds the limit
value
Command speed for motor exceeds 3300[rpm].
Position error value is higher than specified value*1 in position
command status. *1
The motor is continuously operated more than 5 second under a
load exceeding the max. torque.
The internal temperature of the drive exceeds 85℃.
Over regeneratived
voltage
Back-EMF more than limit value. *2
The connection of drive and motor is defective.
The connection of drive and encoder is defective.
The power supplied to the motor is less than low limit value.*3
After operation is finished, a position error occurs.
Drive system is halted(Watch Dog Timer).
Read/Write error on ROM device in drive system.
Position error value is higher than specified value*1 in motor
stop status. *5
 Loading...
Loading...
