www.fastech.co.kr
* Moving signal is not related to actual position. The signal becomes to [OFF]
Just after the ‘position command’is finished.
6) ‘Org Search OK’Output
When the origin return motion is executed by origin search command, ‘Origin Search OK’
signal is set to OFF. When the origin return motion is normally finished by the origin
sensor, ‘Origin Search OK’ is set to ON. When the alarm happens, this signal is set to
OFF. Refer to 「10.3 Input Signal - 9) Origin Search Input」.
7) ‘Servo Ready’Output
When the drive supplies power to the motor by Servo ON signal or command and is ready to
perform motion command, ‘ServoReady’ signal displays ON signal. Refer to 「10.3 Input
Signal – 7) Servo On and AlarmReset Input」.
8) ‘PT(Position Table) Output 0~2 ‘Output
Control output used for ‘Start/Stop Message Function’. When these items are set, this
signal enables the user to check if corresponding PT motion starts or stops through
control output signal. If ‘Start/Stop Message Function’ is not used, this signal
should be set to 0 or 8. At the position set with other values, the motion operates as
follows.
・ If PT set items are set to ‘1~7’, when the position starts to move, PT Output HEX
value is displayed to ‘PT Output O ~ PT Output 2’.
・ If PT set items are set to ‘9~15’, the position motion is finished and then PT
Output HEX value is displayed to ‘PT Output O ~ PT Output 2’.
For more information, refer to 「 Ezi-SERVO Plus-R User Manual – Position Table
Function」.
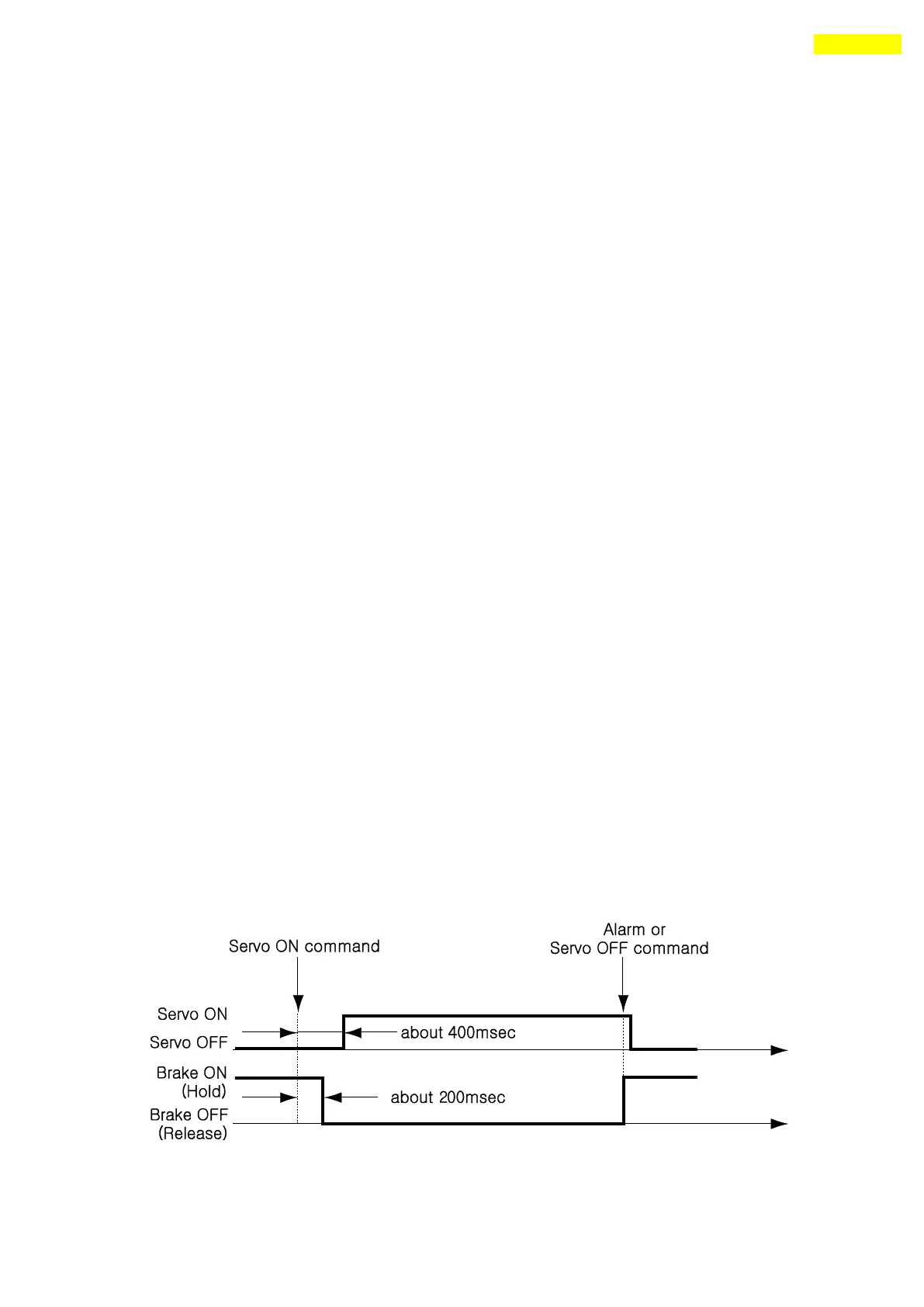
9) ‘BRAKE+’and ‘BRAKE-‘ Output
This function is used to protect motor rotation in Servo ON status by pin23
And pin24 of CN1 connector. DC +24V is connect to‘BRAKE+’for brake logic
and brake control signal is connect to ‘BRAKE-‘.
This output function must be used to the Brake that is under 200[mA]/DC24V
of current consumption.
* The delay time of ‘Brake OFF’process after Servo ON command is define in
‘Brake Delay Time [No.34]’parameter.

 Loading...
Loading...