www.fastech.co.kr
12. Other Operation Functions
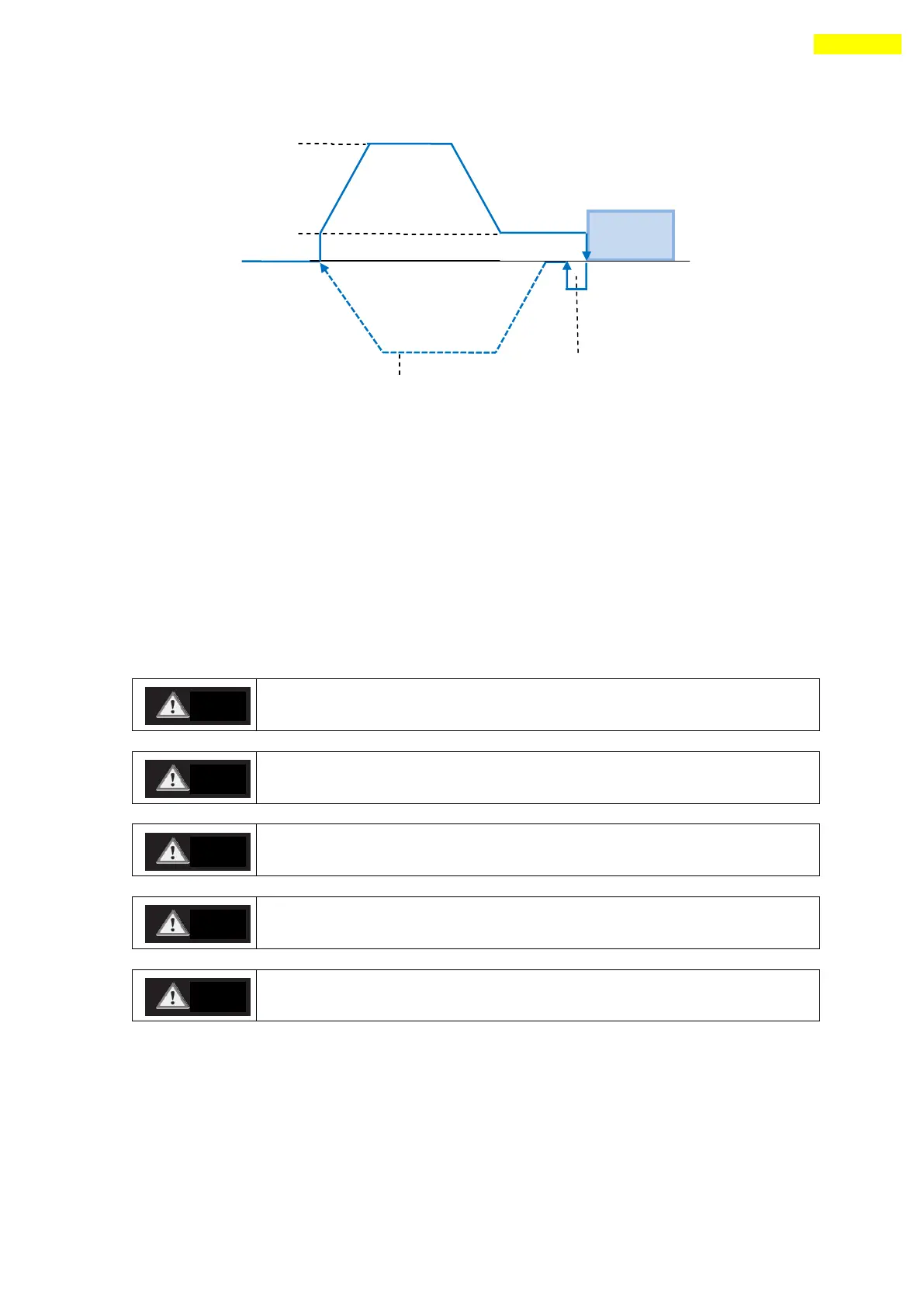
⑥ Additional the next step is needed as below diagram (Figure 10.6.2).
Figure 10.6.2
The ‘Stop’command must be executed before next motion command. (In Stop mode
it is no need to ‘stop’when there is no shock in mechanism) At this
'stop’ procedure, the motor move to backward as much as the ‘Push mode’
parameter values. This motion will be reduce the shock in mechanism. So if the Stop
command is not used, ‘Backward motion’ is also not executed. ‘Backward motion’
speed is set to 5000[pps] at this moment.
⑦ Time delay can be needed before returning to start position depends on
mechanical conditions.
⑧ Return to start position.
Non-stop mode : must be execute the ‘Stop’ command before next motion
command in the work detect situation.
If there is shock in mechanism, the time delay is needed after ‘Stop’
operation.
Extends the distance of Position motion command when Push motion is not
excuted.
If alarm happens with ‘stop’ command after push motion executed,
change the ‘Push mode’ value to bigger or smaller.
If the work can not be detect during Push Position, the push mode is
Automatically finished.
(2) Specification
The push torque is different for each motor size. Refer to 「4.Characteristic
of Motor Torque」.
Push ratio (from 20~90[%] ) value is referenced to stop status torque on ‘Torque
Backward motion in STOP
command
Return motion to start
position