www.fastech.co.kr
12. Other Operation Functions
*1 : The unit of [pps] in this item is referenced to 10,000[ppr] encoder.
Input signal(PT Start) Method
Firstly the position table data must be entered before the push motioning and
refer to 「User Manual – Position Table Function」.
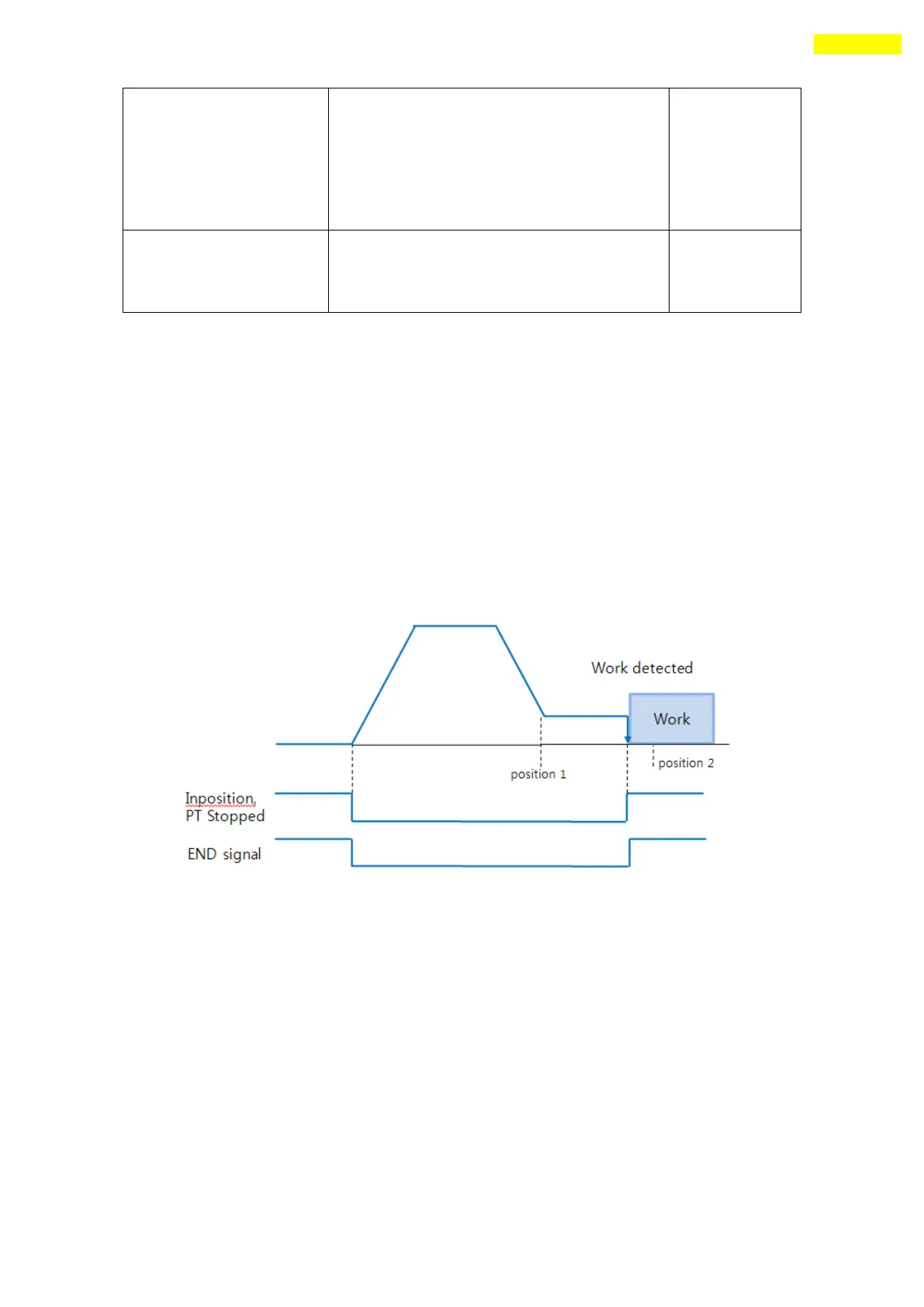
(4) Status Check
Basically the current push motion status can be checked by DLL library and
Additionally can be checked by Flag(Inposition & PT Stoped signal) and Output
(END signal) as follows.
Work detected
Work not detected
The ‘Inposition’ and other signals are still OFF when the work is not detected.
By ‘stop’ command these signals change to ON status. If the work is overdue
after work detect(‘Inposition’ signal is ON), the ‘Inposition’ signal change to OFF
status. But the ‘PT Stopped/END’signal is still ON after the first work detect.
The push command is stoped at ‘position 2’(absolute position value in push command).
(5) Alarm
Basically the alarm (#3 and #4) function is not working during push motion moving.
This is because of the position error and overload alarm can be happen in push mode.
If the alarm happens during return to start position after finishing push motioning,
increase the parameter ’27. Position Tracking Limit’value.
(‘position 2’ of Figure10.6.1)
*Non-stop mode : the value must be set
more than ‘ Position command Target
Position’ value.
*The motor will stop if the position is
exceed this value even if the work is not
detected.
Set Stop mode(0) or Non-stop mode(1~
10000) after the work detect. In case of
Non-stop mode, the motor move backward as
much as this value[pulse] distances.