5
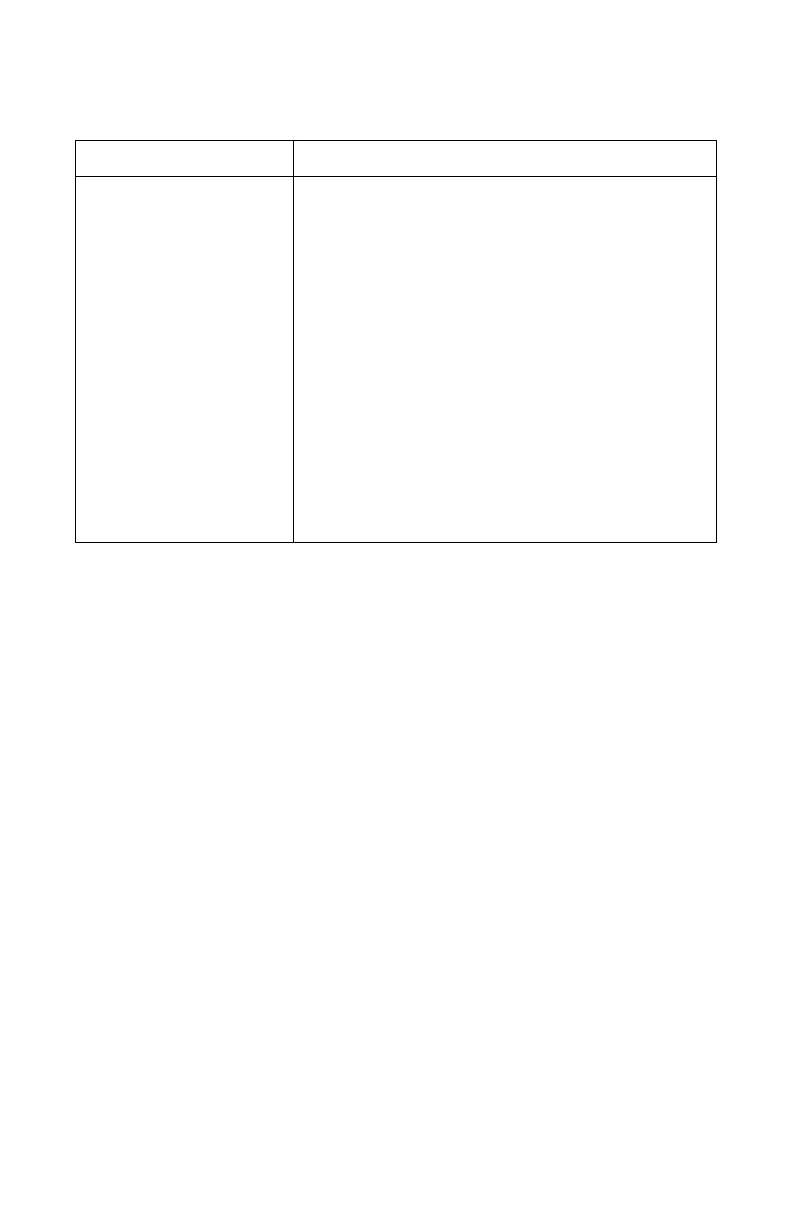
Table 1-1. SGA Performance Characteristics
Parameter Characteristic
Gimbal type Elevation over azimuth, two axes of freedom
Field of regard
360 continuous in both axes
Stabilization
Three rate sensors, two axes, stabilization at
Nadir
Power consumption
200 watts average @ 28 Volts, Direct
Current (VDC), operating
Weight 28.3 lbs.
Size 9 inches diameter x 15.2 inches height
Slew rates
0 to 65 per second in both axes
Position accuracy 3 arc minutes
Kmax Acceleration
60sec/sec both axes
1.4.1.1 Gyro Stabilization
Stabilization is an essential part of the SeaFLIR II Imaging System.
Vibration and movement of the host platform can make viewing and
tracking targets difficult and even impossible. This is especially true
when the system is in the narrow field of view. The SeaFLIR II Imaging
System uses three rate-sensitive fiber-optic-gyros (FOG) (2 azimuth and
1 elevation) to compensate for vibration and motion of the host platform.
All gyros provide analog outputs. The amplitude of these outputs
corresponds to any rate or motion imparted to the gyro(s). Each gyro’s
analog signal is conditioned in the SGA and sent to the CEU as an error
signal. The error signal is used by servo control circuitry to create a
drive voltage for the respective torque motor. The torque motors
stabilize the SGA in two axes, azimuth and elevation. The rate gyros
used are fiber-optic-gyros with no spinning masses that are subject to life
limitations. The rate gyros do experience drift caused by electronic and
thermal changes over time. This appears as a command for the Gimbal
to slew. To reduce this effect, a gyro null circuit has been incorporated
into the SeaFLIR II Imaging System. The drift effect may be noticed
during initial system start-up. When this occurs, the operator has the
option to use either manual or activate an automatic null feature, to
cancel out the gyro drift. See paragraph 3.1.7 for the Gyro NULL
function.
Commercial in Confidence
Export Level 2
Issued to: AgustaWestland
CM Ref:4049
Valid on Day of Issue only.
Document will not be updated
Uncontrolled : 4256
Retrieval Date:07-Dec-10
Requested by Bower, Richard
 Loading...
Loading...