EP5 Electro Pneumatic Digital Positioner FCD PMENIM0006-00-A5 12/18
8
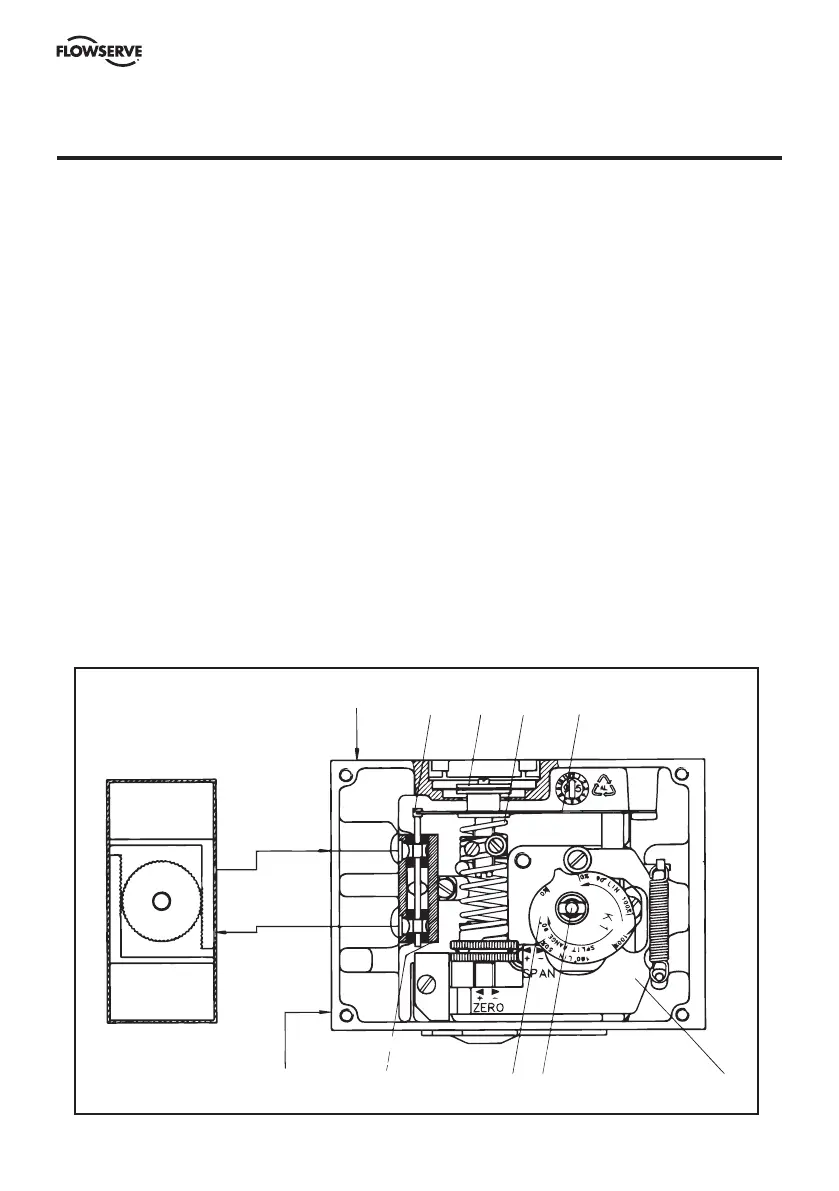
3. Function
The P4 and P5/EP5 operates on a force balance principal. Force is originated by the signal pressure
transmitted through a diaphragm on to the balance arm. The opposing force is achieved through the
feedback spring and is proportional to the position of the lower arm.
The lower arm position is determined by the position of the cam which is secured to the spindle and
connected to the actuator shaft thus providing the feedback from the actuator/valve. When these
two forces are equal, the balance arm and the spool in the pilot valve are in a neutral position — the
complete unit is in a balanced position. Air is supplied to the pilot valve through port S, and controls
the air flow through ports C1 and C2
Assume an equilibrium position.
An increased control pressure will deflect the diaphragm 1 down, compressing the feedback spring
3. The balance arm 2 moves the spool 7 in the pilot valve 8 furnishing supply air to the actuator,
while at the same time air is exhausted from actuator and is vented to atmosphere through the
pilot valve and the OUT port . With the increased supply air, the actuator rotates (or moves linearly)
moving the positioner spindle 6. The spindle and cam 5 rotate, forcing the lower arm 4 upwards
compressing the feedback spring 3. This motion will continue until the two forces are equal and the
unit is in an equilibrium position.
I
7312
S
4658
 Loading...
Loading...








