21
(2) Extended Speed Control Instance (factory default)
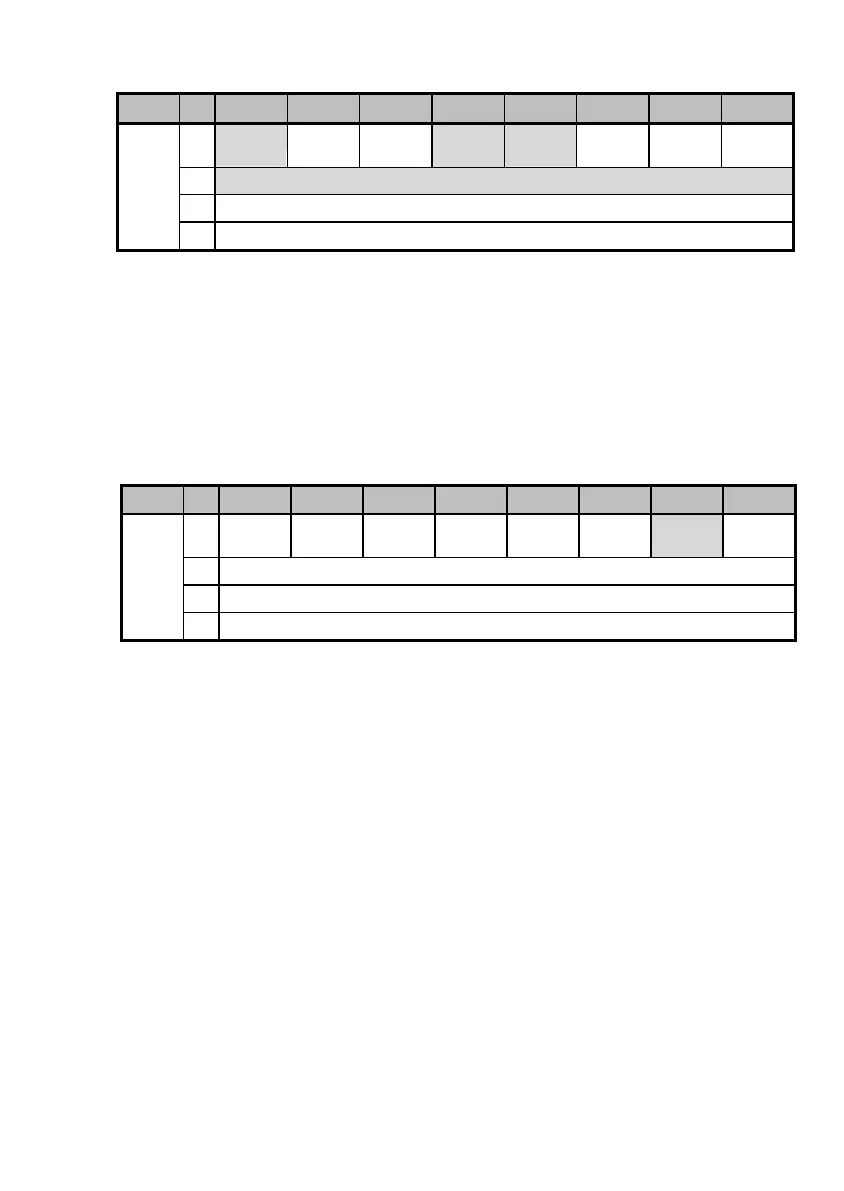
Output (from master to this option): o31=0 or 21
Instance byte bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
0 - NetRef NetCtrl - - Fault
Reset
Run
Reverse
Run
Forward
1 (Fixed at 00)
2 Speed Reference (lower byte) (r/min)
21
3 Speed Reference (upper byte) (r/min)
Run Forward: 1 = Run forward command
Run Reverse: 1 = Run reverse command
Fault Reset: 1 = Reset the alarm condition
NetCtrl: 1 = Request for enabling run command sent from DeviceNet;
0 = Request for enabling run command sent from other than DeviceNet
NetRef: 1 = Request for enabling speed reference sent from DeviceNet;
0 = Request for enabling speed reference sent from other than DeviceNet
Speed Reference: Speed reference (in r/min)
Input (from this option to master): o32=0 or 71
Instance byte bit 7 bit 6 bit 5 bit 4 bit 3 bit 2 bit 1 bit 0
0 At
Reference
Ref
FromNet
Ctrl
FromNet
Ready Running
Reverse
Running
Forward
- Faulted
1 Drive State
2 Speed Actual (lower byte) (r/min)
71
3 Speed Actual (upper byte) (r/min)
Faulted: 1 = The inverter has (and remains) tripped.
Running Forward: 1 = The motor is running forward.
Running Reverse: 1 = The motor is running backward (in the reverse direction).
Ready: 1 = Ready to run
CtrlFromNet: 1 = Run command sent from DeviceNet being enabled
0 = Run command sent from other than DeviceNet being enabled
RefFromNet: 1 = Speed reference sent from DeviceNet being enabled
0 = Speed reference sent from other than DeviceNet being enabled
At Reference: 1 = The motor is running at the reference speed.
Drive State: 1 = Startup, 2 = Not Ready, 3 = Ready, 4 = Enabled, 5 = Stopping,
6 = Fault stop, 7 = Faulted
Speed Actual: Actual rotation speed (in r/min)