ADV200 • Functions description and parameters list 103
When set to 0 (Openloop) the slip compensation value is that set manually in parameter 5210 or calculated by
the self-tuning procedure.
If set to 1(Closedloop) the slip compensation value is measured by the reading of the signals by a digital
encoder keyed to the motor shaft. The EXP-DE-I1R1F1-ADV expansion card must be installed in the drive in
order to acquire encoder signals.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
21.13 2446SlipPgain perc FLOAT 1.0 0.0 100.0 ERWS V
Setting of the slip compensation proportional gain.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
21.14 2448SlipIgain perc FLOAT 1.5 0.0 100.0 ERWS V
Setting of the slip compensation integral gain.
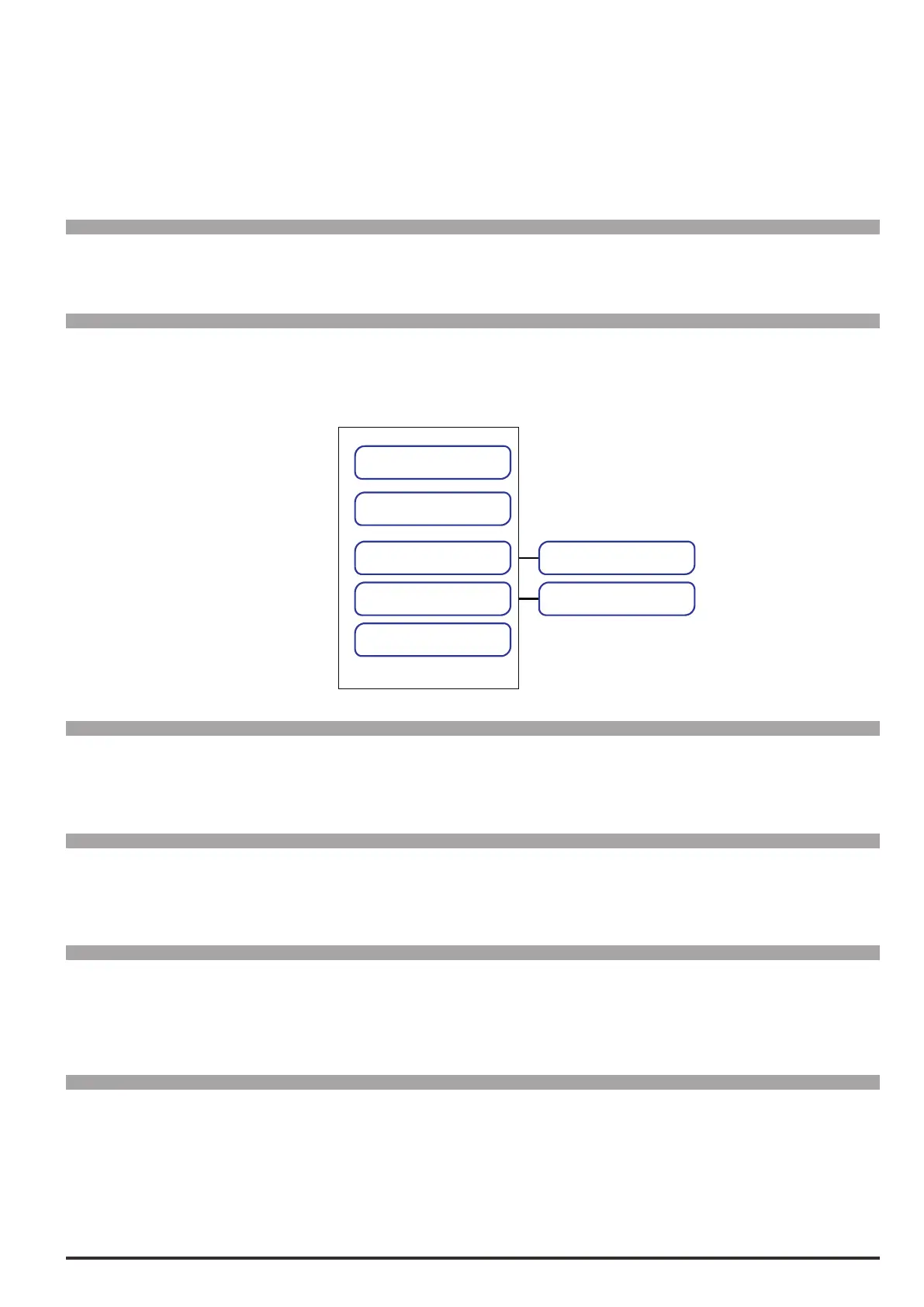
Vf limit
Torque lim Pos Inuse
PAR 2360
Torque lim Neg Inuse
PAR 2362
Torque curr lim Pos
PAR 2350
Torque curr lim Neg
PAR 2352
Torque curr lim sel
PAR 2354
Vfcurrent lim I time
PAR 2362
Vfcurrent lim P time
PAR 2460
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
21.15 2460VfcurrentlimPgain Hz/A FLOAT CALCF 0.0 1000.0 ERWS V
Setting of the proportional gain limit in V/f mode. This is calculated automatically if the self-tuning procedure is
performed.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
21.16 2462VfcurrentlimItime ms FLOAT CALCF 1.0 50.0 ERWS V
Setting of the proportional gain limit in V/f mode. This is calculated automatically if the self-tuning procedure is
performed.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
21.17 2470Dampinggain perc UINT16 0 0 100 ERW V
Setting of the damping gain. The parameter is used to eliminate any oscillations or faults in the drive output cur-
rent, deriving from congurations capable of generating oscillations in the drive/cable/motor system. If oscilla-
tions occur, gradually increase the value of this parameter, until they disappear.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
21.18 2472Dampingthreshold1 Hz INT16 20 5 100 ERW V
Setting of the rst damping gain regulation threshold. These settings are usually effective for intermediate fre-
quencies and make it possible to limit motor oscillations.

 Loading...
Loading...











