DA98A AC Servo Drive Unit
User Manual
16
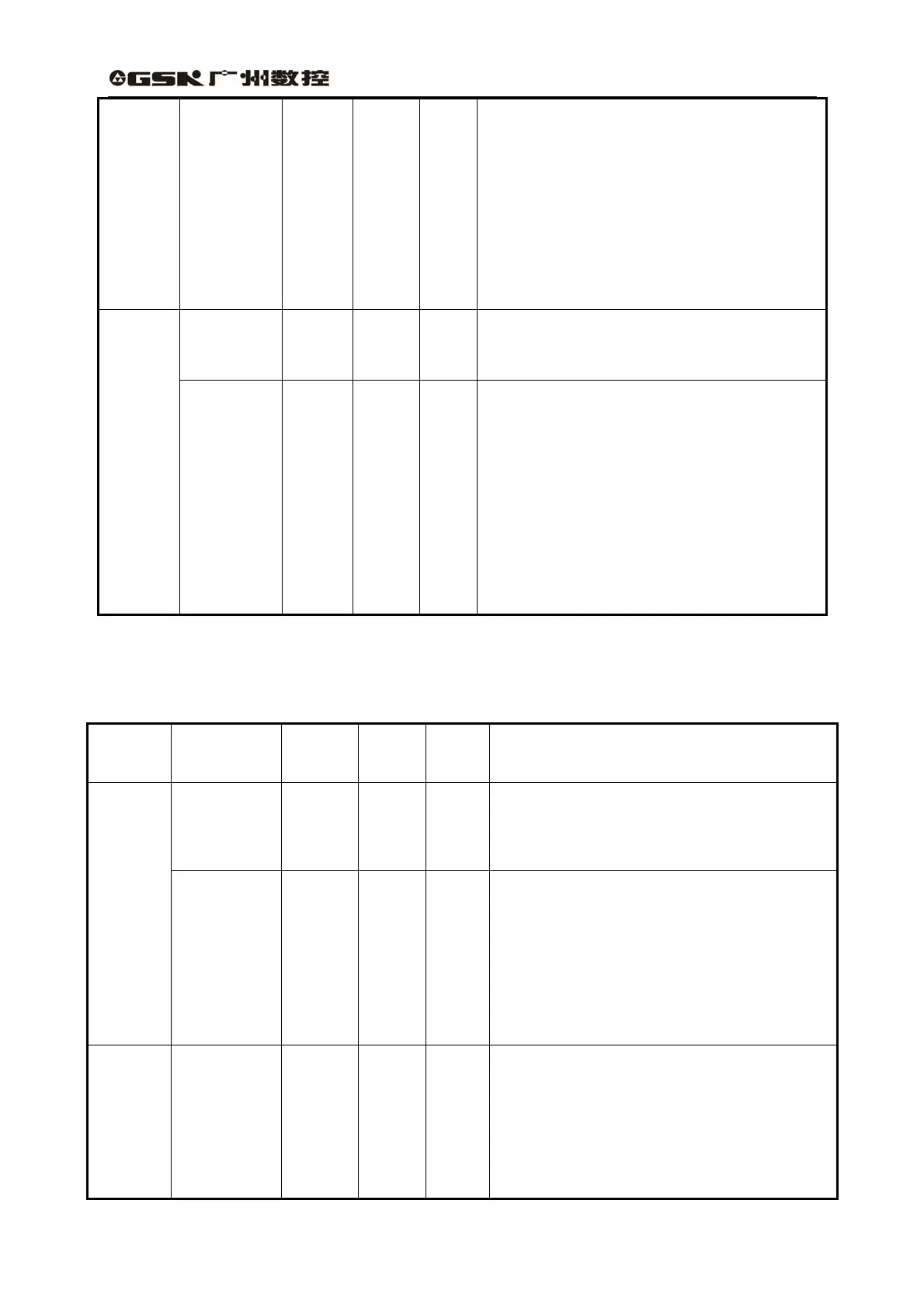
CN1-10
CW drive
stop
RSTP Type 1
CW drive stop input terminal
RSTP ON:CW drive enable
RSTP OFF:CW drive stop
Note 1 It is used for mechanical overload.
When the switch is put for OFF, the torque in
CW direction is kept for 0.
Note 2 This function can be shielded by
parameter No.20 setting or always keep the
switch for ON.
Deviator
clear
CLE Type 1 P
Input terminal of position deviator clear
CLE ON: position deviator clear in position
control
CN1-23
Speed
selection 1
SC1 Type 1 S
Input terminal of speed selection 1
The combination of SC1 and SC2 is used for
selecting different internal speed in speed
control mode
SC1 OFF,SC2 OFF: internal speed 1
SC1 ON,SC2 OFF: internal speed 2
SC1 OFF,SC2 ON: internal speed 3
SC1 ON,SC2 ON: internal speed 4
Note The values of internal speed 1~4
can be modified by parameters.
Table 3.2 Input/output terminal CN1 of control signal (continued)
Terminal
No.
Signal name Sign I/O Mode Function
Instruction
pulse
disable
INH Type 1 P
Terminal of position instruction pulse input
disable
INH ON: input disable of instruction pulse
INH OFF: instruction pulse input valid
CN1-11
Speed
selection 2
SC2 Type 1 S
Input terminal of speed selection 2
The combination of SC1 and SC2 is used for
selecting different internal speed in speed
control mode.
SC1 OFF,SC2 OFF: internal speed 1
SC1 ON:SC2 OFF: internal speed 2
SC1 OFF,SC2 ON: internal speed 3
SC1 ON,SC2 ON: internal speed 4
CN1-12
CCW torque
limit
FIL Type 1
CCW input terminal of CCW torque limit
FIL ON : CCW torque is limited by the
parameter No.36.
FIL OFF: CCW torque is not limited by the
parameter No.36.
Note Whether FIL is valid or not, CCW
torque is also limited by parameter No.34.