DA98D User Manual
36
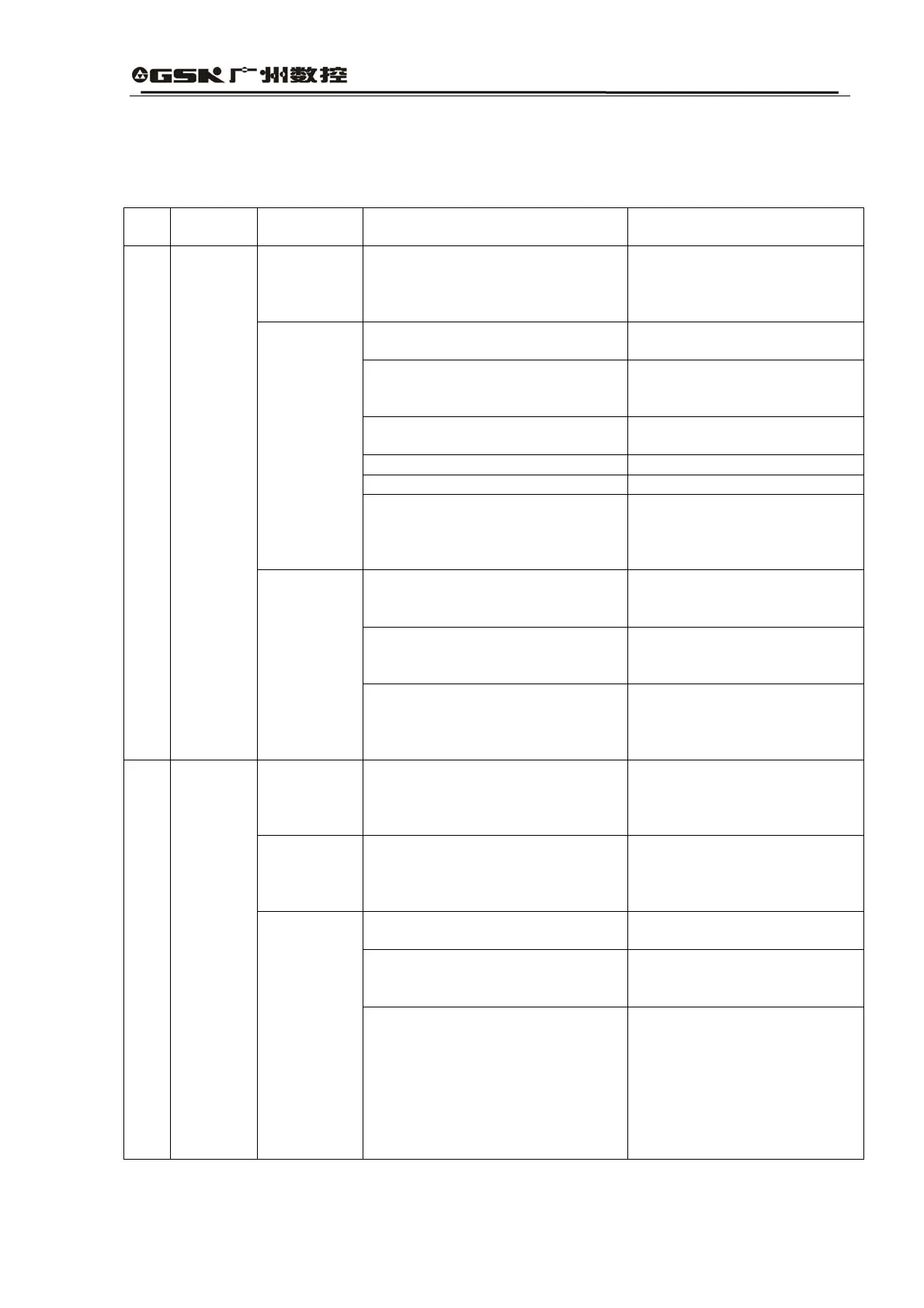
5.2 Methods for Handling Alarms
Table 5.2 Methods for Handling Alarms
Alarm
Code
Alarm
Name
Operation
State
Reasons Handling Methods
Occur when
switching on
the control
power
①Failure in control power board
②Encoder failure
①Replace servo driver.
②Replace servo motor.
Excessively high input command
pulse frequency.
Correctly set the input
command pulse.
Excessively small acceleration/
deceleration time constant results
in overshoot.
Increase
acceleration/deceleration tim
constant.
The input electronic gear ratio is
excessively high.
Correctly set the ratio.
Encoder failure. Replace servo motor.
Bad encoder cable. Replace encoder cable.
Occur during
motor
operation
Instable servo system cause
overshoot.
①Reset related gains.
②If the gains cannot be set at
a proper value, reduce inertia
rate for load rotation
Excessively large load inertia.
①Reduce load inertia.
②Replace it with driver and
motor of greater frequency.
Zero-point error in encoder.
①Replace servo motor
②Contact the manufacturer
for readjusting the zero point.
1
Excessive
Speed
Occur
immediately
after the
motor is
started
①Wrong connection of motor lead
of U, V and W.
②Wrong connection of encode
cable leads
Correct wiring.
Occur when
switching on
control
power
Failure in circuit board. Replace servo drive unit.
Occur when
switching on
main power
supply
①Excessively high power voltage.
②Abnormal wave pattern of power
voltage.
Examine the power supply
source.
Disconnection of braking
resistance.
Rewiring.
①Braking transistor is damaged.
②Internal braking resistance is
damaged.
Replace servo drive unit.
2
Over-
voltage in
Main
Circuit
Occur during
motor
operation
Insufficient capacity in the braking
return circuit.
①Reduce start/stop frequency .
②Increase
acceleration/deceleration time
constant.
③Reduce torque limiting value.
④Reduce load inertia.
⑤Replace it with driver and
motor of greater frequency.