37
ピッチ/スロットルの設定
100%
50%
0%
100%
50%
0%
100%
50%
0%
100%
50%
0%
100%
50%
0%
ホバリング
Hovering
オートローテーション
Auto-rotation
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
3D
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
ループ系
Loop
ロール系
Roll
100%
50%
0%
100%
50%
0%
100%
50%
0%
100%
50%
0%
ホバリング
Hovering
ループ系
Loop
3D
オートローテーション
Auto-rotation
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
スティック:ロー
Stick: Low
スティック:中立
Stick: Center
スティック:ハイ
Stick: High
100%
50%
0%
ロール系
Roll
5˚
-2.5˚ 〜 -3˚
オートローテーション
Auto-rotation
ローピッチ
Low pitch
ハイピッチ
High pitch
コンディション
Condition
ニュートラル
Neutral
ID1
(ループ系)
Loop
N
(ホバリング)
Hovering
ID2
(ロール系)
Roll
3D
7˚
2˚
7˚ 〜 7.5˚ 7˚ 〜 7.5˚
11˚ 〜12˚
0˚〜1˚
-4˚
-5˚
7.5˚ 〜 8˚
0˚
-7.5˚ 〜 -8˚
-6˚ 〜 -7˚
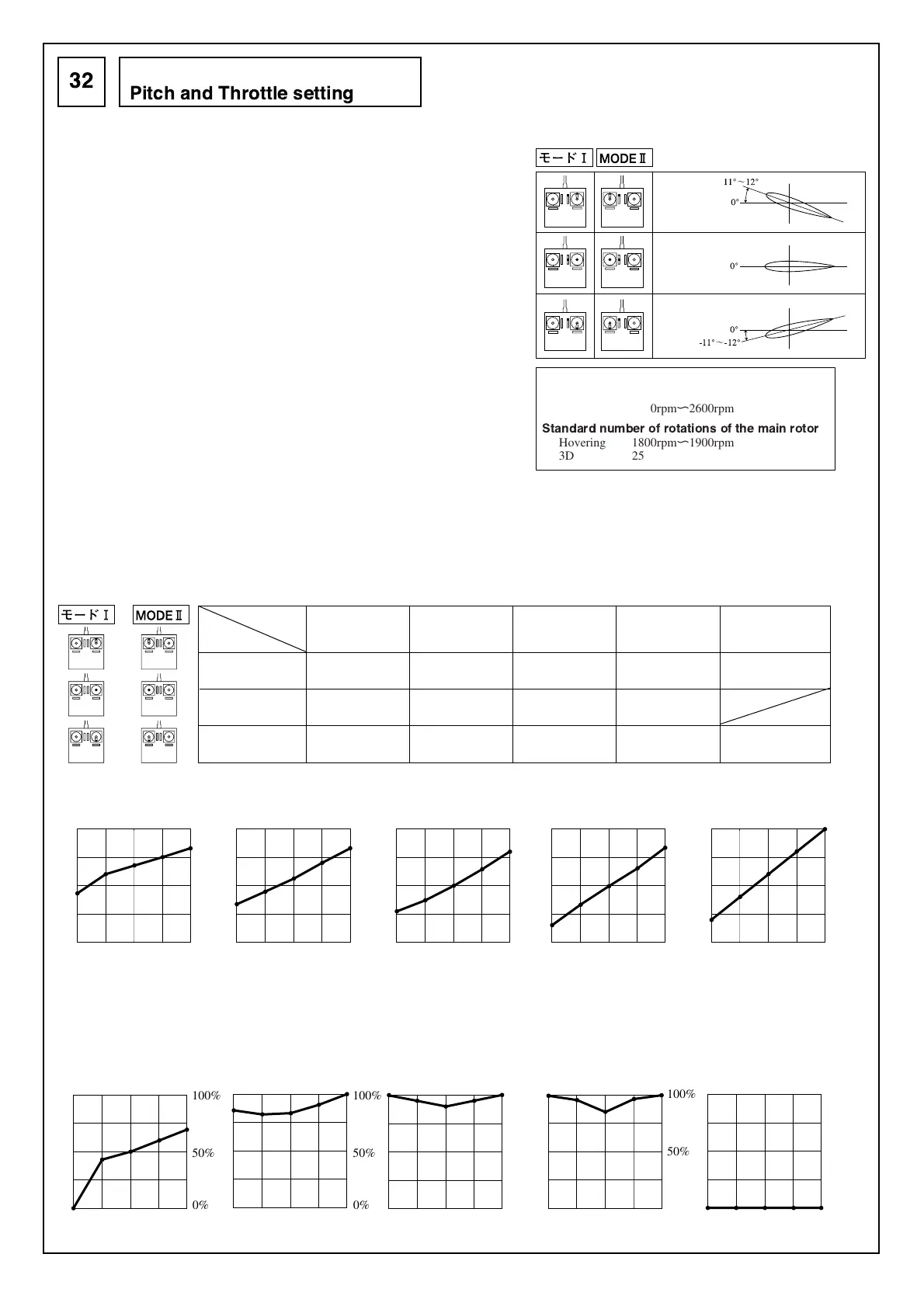
■ピッチの設定
■ピッチカーブの設定
■スロットルカーブの設定
■Pitch curve setting
■Throttle curve adjustment
■Pitch setting
①
送信機のピッチカーブ機能にデータが入力されていないことを確認して下さい。
もし入力されている場合はデータを消去して下さい。(詳しくは送信機の説明書
をご覧下さい。)
②
送信機のスロットルスティック中立のとき、メインブレードのピッチが0°になる
ように、ピッチロッドの長さを調整します。※必ず両方のメインブレードを調整
してください。
③
ピッチの全ストローク(ローピッチとハイピッチの差)が約22°〜24°になってい
るか確認して下さい。例えばローピッチが–11°の場合、ハイピッチが11°ならば
11°– (–11°) =22°になります。もし全ストロークが22°〜24°にならないときは送
信機のスワッシュモード用舵角調整機能(スワッシュAFR、スワッシュミキシング、
CP-EPA等)を使用して、22°〜24°になるようデータを入力して下さい。
(設定の行い方は、ご使用の送信機の説明書をご覧ください。)
各コンディションごとのピッチ角が下の表のようになるよう送信機のピ
ッチカーブ機能にデータを入力して下さい。
スロットルカーブは、バッテリー、モーター、スピードコントローラー、
および気候等により変化します。下のグラフや巻末のデータシートを参
考にデータを入力した後、実際にフライトをして微調整をして下さい。
(Refer to your transmitter’s instruction manual for radio specific pitch curve
setting descriptions).
Adjust your radio’s pitch curve percentages so the following suggested pitch
curve degrees are measured on your helicopter at the low, mid and high points.
※このデータはコンピュータプロポを使用のものです。
使用するモーター、スピードコントローラー、サーボ等により変化し
ます。一般的な目安です。
* Computer Propo is used for the data.
Note: Actual values can vary depending on your selection of motor, speed
controller, or servos, etc., and this data is thereby a general guideline only.
A throttle curve can vary due to battery, motor, speed controller, weather, etc.
The below graphs and data at the end of this manual are starting points only and
will require finer tuning after first flights have been made.
①
Check that no data has been input into the pitch curve function of the transmitter. If any
data has been input, delete it. (Refer to the transmitter instruction manual for the details.)
②
Adjust the length of the pitch rods so that the main blade pitch is 0° when the transmitter
throttle stick is at neutral.
* Adjust for both main blades.
③
Check that the full stroke (the difference between the low pitch and high pitch) is set to
approximately 22° to 24°. For example, if the low pitch is set to –11° and the high pitch is
set to 11°, then it is 11° – (–11°) = 22°. If the full stroke does not become 22° to 24°, use
the transmitter’s rudder angle adjustment functions for swash mode (swash AFR, swash
mixing, CP-EPA, etc), and input data so that it becomes 22° to 24°.
ピッチカーブ(参考)
Pitch curve (reference)
スロットルカーブ(参考)
Throttle curve (reference)
中立
Neutral
ハイピッチ
High pitch
ローピッチ
Low pitch
メインローターの回転数の目安
ホバリング 1800rpm〜1900rpm
3D 2500rpm〜2600rpm
Hovering 1800rpm〜1900rpm
3D 2500rpm〜2600rpm