Chapter 3 Operation
POWER CON
PCON-CB/LC
72
• Procedure 3 : Turn the servo ON, and have a home-return operation.
• Procedure 4 : Define the destination (position) of the slider or rod of the actuator.
The destination can be defined by using the following two methods:
1) Read out the coordinate values from such a tool as CAD.
2) Drive the slider or rod with the JOG operation to the destination,and set the position
data directly.
• Procedure 5 : Type the destination in the column of Position in Position Table.Once the position
is filled, the maximum settable values for Speed and Acceleration/Deceleration are
automatically input.
☆ Set position directly with JOG operation
JOG (Backward) JOG (Forward)
• Procedure 6 : Transfer the information such as Position that is written in Position Table to the
controller.
●Operation・・・・Example for Parameters (PIO Patterns 0) at Delivery
• Procedure 1 : Input the position number at which positioning is desired to be performed in the
binary data (PC1 to PC32) from a tool such as the host controller, and then turn
the start signal (CSTR) ON.
• Procedure 2 : The actuator is placed at the proper coordinate value (destination) according to
the positioning information in the specified position number.
• Procedure 3 : If the positioning is completed, the binary data (PM1 to PM32) of the position
number is output. The completion signal (PEND) is also output.
The above procedure describes the basic operation method in the positioner mode.
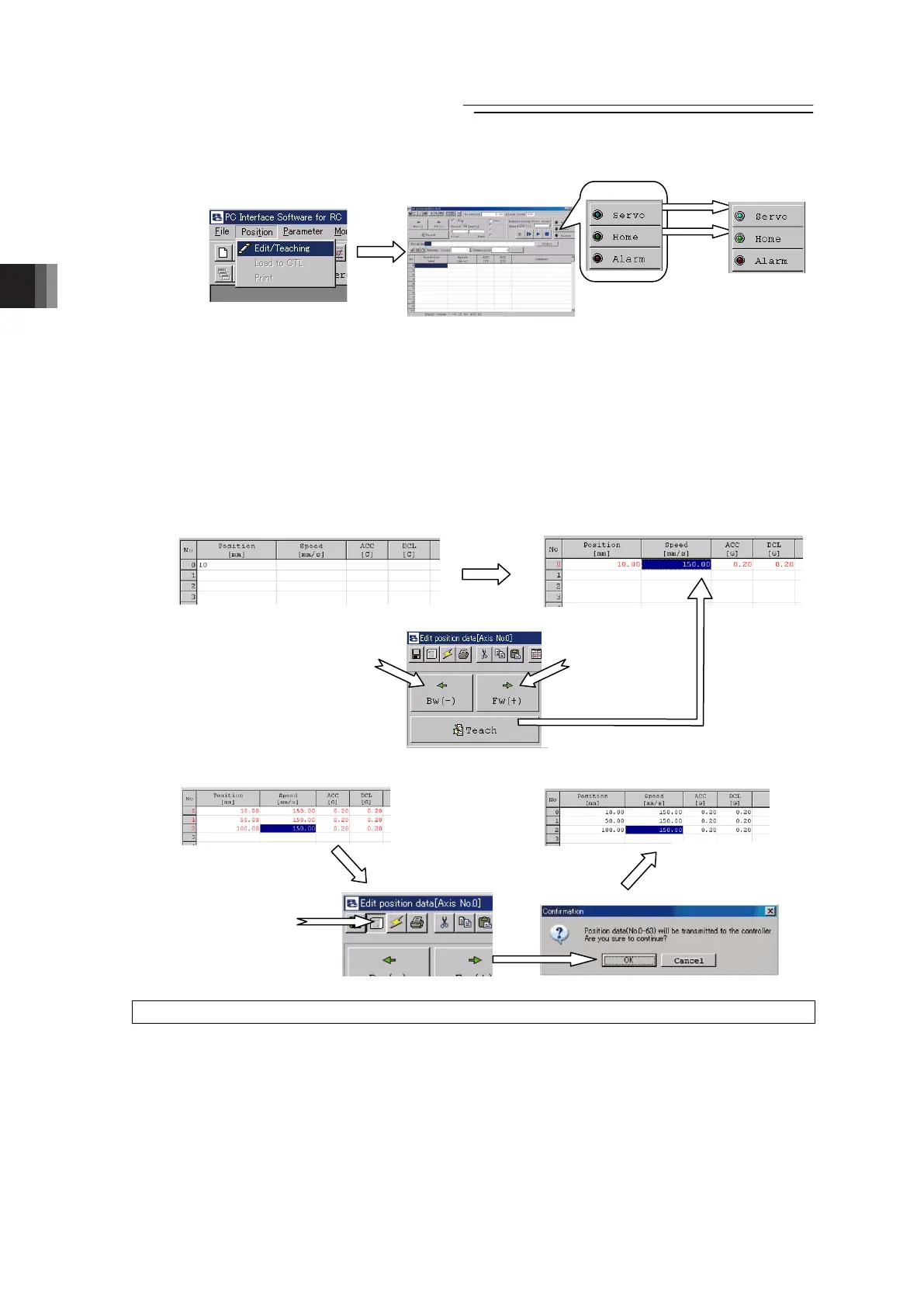
Open Position Table Select Position ->
Edit / Teach in Menu
1) Press the Servo
2) Turn on the Servo lamp
3) Press the Home
4) Turn on the Home lamp
(after actuator is stopped)
Written in red
before transferred
Turn to black after
transfer complete
Press “Transfer
to Controller”
Press the OK
 Loading...
Loading...










