Chapter 1 Specications Check
POWER CON
PCON-CB/LC
22
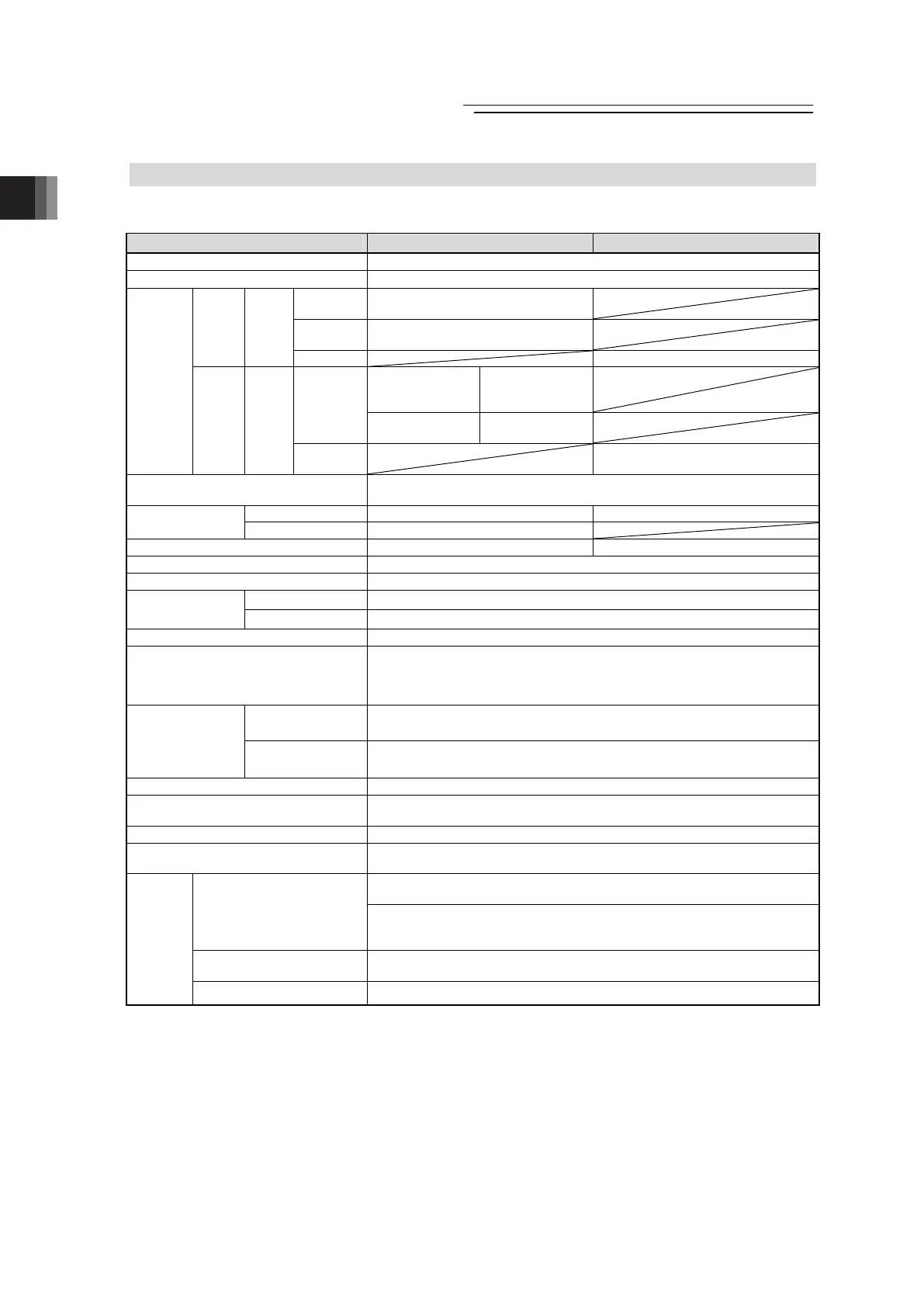
1.2 List of Basic Specifications
Item PCON-CB/CGB PCON-CFB/CGFB
Number of controlled axes 1-axis
Power-supply Voltage
24V DC ±10%
20P, 28P,
28SP
MAX. 1.0A
35P, 42P,
56P
MAX. 2.2A
RCP2
RCP3
Motor
Type
60P, 86P MAX. 6A
High-thrust
function is
disabled
MAX. 2.2A 28P, 35P,
42P, 42SP,
56P
High-thrust
function is enabled
Rated 3.5A /
MAX. 4.2A
Load
current
(including
control side
current
consumpti
on)
(Note 1)
RCP4
RCP5
RCP6
Motor
Type
56SP, 60P,
86P
MAX. 6A
Power Supply for Electromagnetic Brake
(for actuator equipped with brake)
24V DC ±10% 0.15A (MAX.)
RCP2, RCP3 5W 19.2W Heat Generation
RCP4 to RCP6 8W
Rush Current
(Note 2)
8.3A 10A
Transient Power Cutoff Durability
MAX.500μs
Motor Control System Weak field-magnet vector control
RCP2 to RCP5 Incremental encoder, Battery-less absolute encoder Resolution 800pulse/rev Corresponding
Encoder
RCP6 Battery-less absolute encoder Resolution 8192pulse/rev
Motor/Encoder Cable Length MAX. 20m
Serial Communication Interface
(SIO Port)
RS485 : 1 channel (based on Modbus Protocol RTU/ASCII)
Speed : 9.6 to 230.4Kbps
Control available with serial communication in the modes other than the pulse
train
PIO Type
Signal I/O dedicated for 24V DC (selected from NPN/PNP) … Input 16 points
max., output 16 points max. Cable length MAX. 10m
External Interface
Fieldbus Type
DeviceNet, CC-Link, PROFIBUS-DP, CompoNet, MECHATROLINK-Ⅰ/Ⅱ,
EtherCAT, EtherNet/IP, PROFINET-IO, MECHATROLINK-Ⅲ
Data Setting and Input PC Software, Touch Panel Teaching, Data Setter
Data Retention Memory Saves position data and parameters to non-volatile memory
(There is no limitation in number of writing.)
Operation Mode Positioner Mode/Pulse Train Control Mode (selected by parameter setting)
Number of Positions in Positioner Mode Standard 64 points, MAX. 512 points
(Note) Number of positions differs depending on the selection in PIO pattern.
Differential System (Line Driver System) : MAX. 200kpps
Cable length MAX. 10m
Input Pulse
Open Collector System : Not applicable.
* If the host applies the open collector output, prepare AK-04 (option) separately
to convert to the differential type.
Command Pulse Multiplying
Factor (Electrical Gear : A/B)
1/50 < A/B < 50/1
Setting Range of A and B (set to parameter) : 1 to 4096
Pulse
Train
Interface
Feedback Pulse Output None
 Loading...
Loading...










