Optidrive Plus 3
GV
Compact - User Guide
www.invertek.co.uk
17
6.4. Parameter Group 4 – High Performance Motor Control
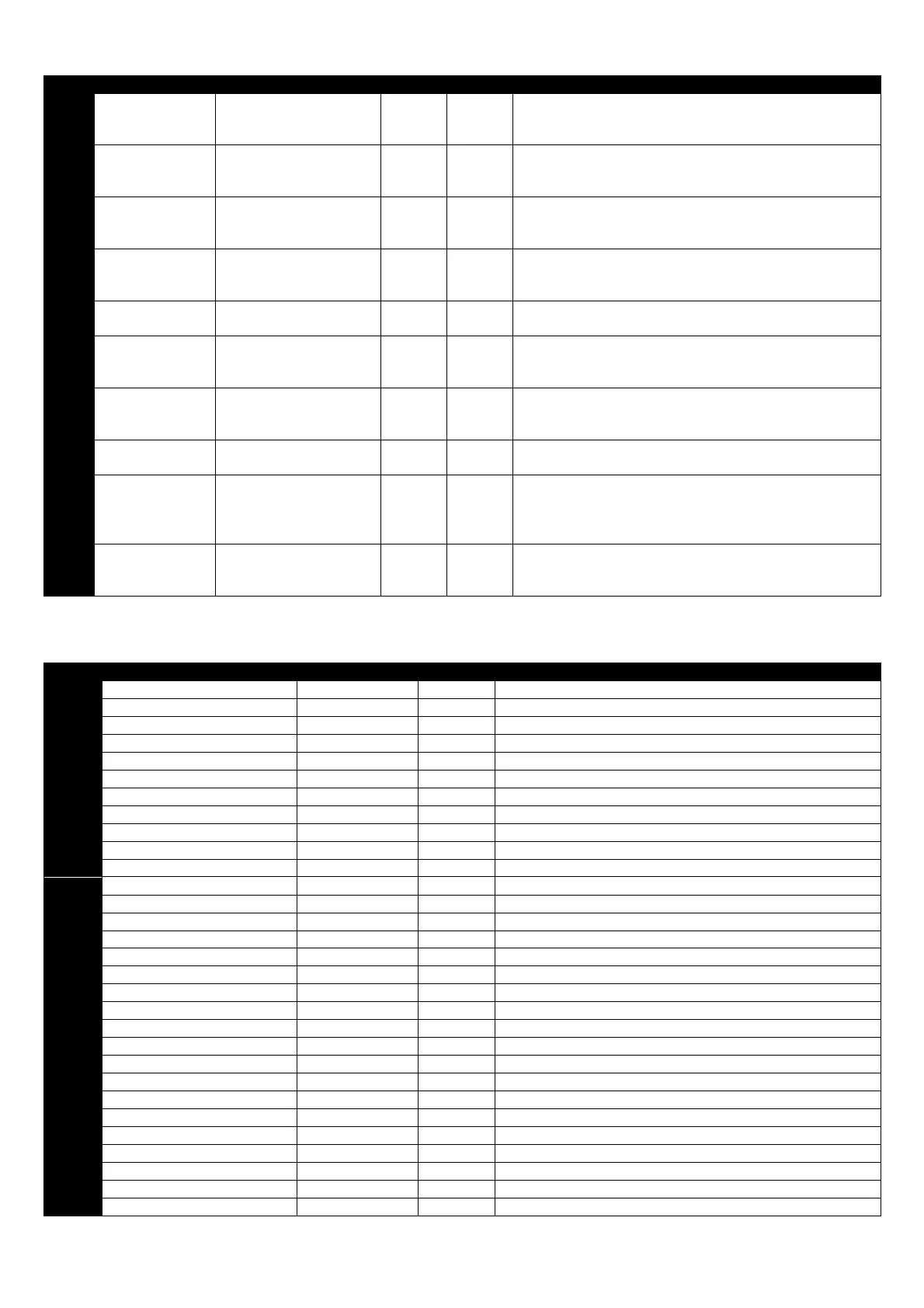
6.5. Parameter Group 0 – Monitoring Parameters (Read Only)
Par. Description Display range Units Explanation
P0-01 Bipolar analog input value 0 to 100 % 100% = max input voltage
P0-02 2nd Analog input value 0 to 100 % 100% = max input voltage
P0-03 Post Ramp Speed Reference -500 to 500 % 100% = P1-09
P0-04 Digital speed reference -P1-01 to P1-01 Hz / Rpm Digital speed reference
P0-05 Torque controller reference 0 to 200 % Torque reference setpoint
P0-06 PID Reference 0 to 100 % PID reference / setpoint
P0-07 PID Feedback 0 to 100 % PID controller feedback value
P0-08 PID error 0 to 100 % Actual PID error
P0-09 PID P Term 0 to 100 % Proportional component
P0-10 PID I term 0 to 100 % Integral component
P0-11 PID D term 0 to 100 % Differential component
P0-12 PID Output 0 to 100 % Output from PID controller
P0-13 Output Torque 0 to 200 % 100% = motor rated torque
P0-14 Magnetising current Drive dependent A Motor rms magnetising current
P0-15 Rotor Current Drive dependent A Rotor rms current
P0-16 Field Strength 0 to 100 % Magnetic field strength
P0-17 Stator resistance Drive dependent Ohms Phase to phase stator resistance
P0-18 Stator Inductance Drive dependent H Stator inductance
P0-19 Rotor resistance Drive dependent Ohm Calculated rotor resistance
P0-20 DC Bus Voltage 0 to 1000 Volts Internal DC Bus voltage
P0-21 Drive Temperature 0 to 120 ºC Measured heatsink temperature
P0-22 Supply voltage L1 – L2 Drive dependent Volts Phase to phase supply voltage
P0-23 Supply voltage L2 – L3 Drive dependent Volts Phase to phase supply voltage
P0-24 Supply voltage L3 – L1 Drive dependent Volts Phase to phase supply voltage
P0-25 Estimated rotor speed Drive dependent Hz / Rpm In vector mode, estimated speed of motor
P0-26 kWh meter 0 to 999.9 kWh Cumulative energy consumption
P0-27 MWh meter 0 to 60,000 MWh Cumulative energy consumption
P0-28 Software ID – IO Processor Drive dependent - Version number & checksum
P0-29 Software ID – Motor Control Drive dependent - Version number & checksum
P0-30 Drive serial number Drive dependent - Unique drive serial number
Par. Description Range Units Default Explanation
P4-01 Control Mode
0 : Vector Speed Control
1 : Vector Torque Control
2 : V/F Speed Control
- 2
Selects the motor control method. An autotune must be
performed following a change, see section 6.4
P4-02
Motor parameter
autotune
0 : Disabled
1 : Enabled
- 0
When set to 1, the drive immediately carries out a non-
rotating autotune to measure the motor parameters for
optimum control and efficiency
P4-03
Speed controller
proportional gain
0 to 4096 - 300
Sets the proportional gain value for the speed controller.
Higher values provide better output frequency regulation and
response. Too high a value may cause instability
P4-04
Speed controller
integral time
0.050 to 1.000 seconds 0.050
Set the integral time for the speed controller. Smaller values
provide a faster response in reaction to motor load changes,
at the risk of introducing instability
P4-05
Motor power
factor
0.50 to 1.00 - -
Motor nameplate power factor, which must be entered for
Vector operation (P4-01 = 0 or 1)
P4-06
Torque reference
source select
0 : Preset Value
1 : Bipolar analog input
2 : 2
nd
analog input
- 0
When operating in vector mode (P4-01 = 0 or 1), selects the
source of the torque reference
P4-07
Maximum torque
limit / torque
reference
0.0 to 200.0 % 200.0
If P4-01 = 1 and P4-06 = 0, sets the preset torque reference
If P4-01 = 0, sets the maximum torque limit
P4-08
Minimum torque
limit
0.0 to 150.0 % 0.0 Sets a minimum torque limit, see the warning below
P4-09
V/F characteristic
adjustment
frequency
0.0 to P1-09 Hz 0.0
When operating in V/F mode (P4-01 = 2), sets a frequency
point at which the voltage applied in P4-10 is applied to the
motor. Care must be taken to avoid over heating and
damaging the motor when using this feature
P4-10
V/F characteristic
adjustment
voltage
0 to P1-07 - 0
In conjunction with P4-09, in V/F mode (P4-01 = 2), sets the
voltage applied to the motor at the adjustment frequency set
in P4-09
Incorrect adjustment of parameters in menu group 4 can cause unexpected behaviour of the motor and any connected machinery.
It is recommended that these parameters are only adjusted by experienced users