Goodrive350 IP55 High-ingress Protection Series VFD Basic Operation Instructions
-93-
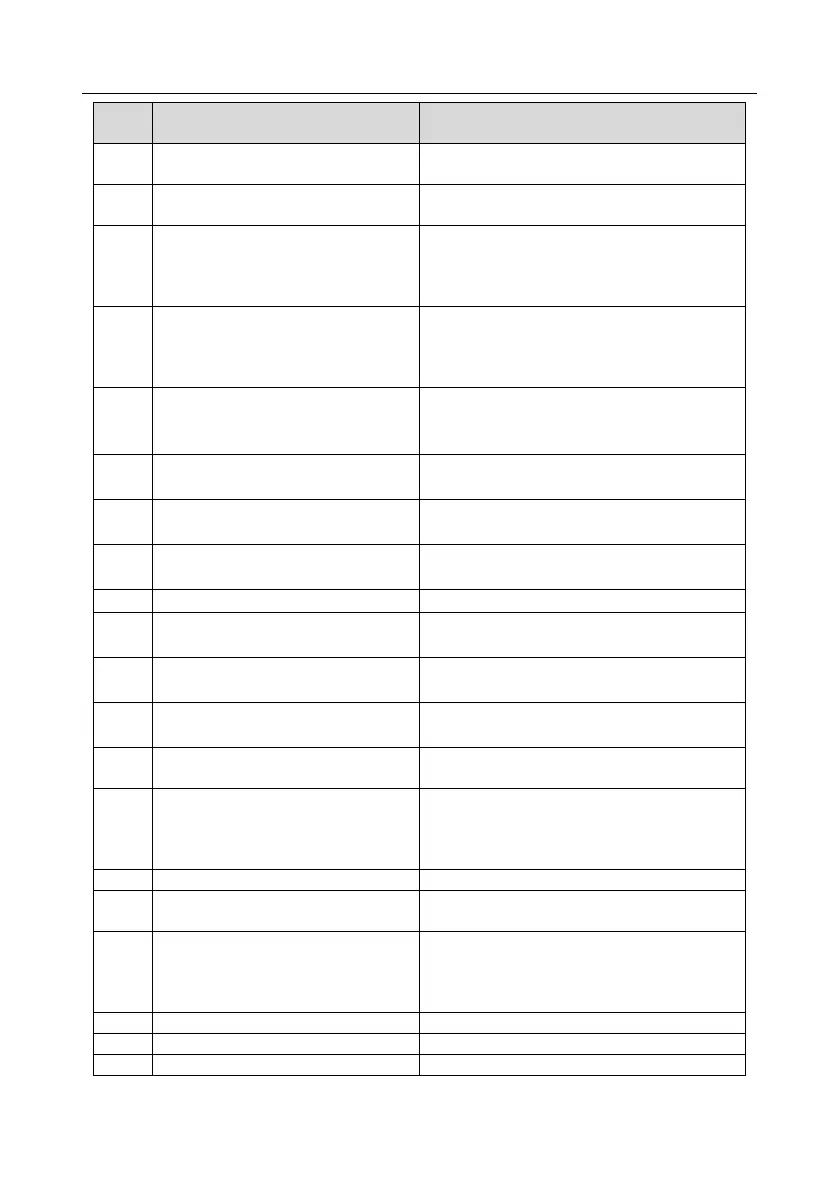
Simple PLC state completed
Output signal when current stage of simple PLC
is completed
Simple PLC cycle completed
Output signal when a single cycle of simple PLC
operation is completed
Virtual terminal output of
Modbus/Modbus TCP communication
Output corresponding signal based on the set
value of Modbus/Modbus TCP; output ON signal
when it is set to 1, output OFF signal when it is
set to 0
Virtual terminal output of
POROFIBUS/CANopen
communication
Output corresponding signal based on the set
value of PROFIBUS/CANopen; output ON
signal when it is set to 1, output OFF signal
when it is set to 0
Virtual terminal output of Ethernet
communication
Output corresponding signal based on the set
value of Ethernet; output ON signal when it is
set to 1, output OFF signal when it is set to 0.
DC bus voltage established
Output is valid when the bus voltage is above
the undervoltage threshold of the inverter.
Output is valid when the encoder Z pulse is
arrived, and is invalid after 10 ms.
During pulse superposition
Output is valid when the pulse superposition
terminal input function is valid
Output when STO fault occurred
Output is valid when position control positioning
is completed
Spindle zeroing completed
Output is valid when spindle zeroing is
completed
Spindle scale-division completed
Output is valid when spindle scale-division is
completed
Speed limit reached during torque
control
Output is valid when the frequency is limited
Virtual terminal output of
EtherCAT/PROFITNET/Ethernet IP
communication
The corresponding signal is output according to
the set value of PROFINET communication.
When it is set to 1, the ON signal is output, and
when it is set to 0, the OFF signal is output.
Speed/position control switch-over
completed
Output is valid when the mode switch-over is
completed
The frequency reached signal is output when
the present ramp reference frequency is greater
than the detection value for frequency being
reached.
Y1 from the programmable card
Y2 from the programmable card
 Loading...
Loading...