LX Series Unit Ventilator Controller User's Guide 59
Time
Derivative control normally responds to measured values rather than the actual
direct input. By doing so, the derivative control is prevented from creating large,
short spikes in the controller output. The spikes are the derivative control response
to sudden increase or decrease in error due to setpoint changes.
Time refers to the period between measurements of the input. If the time is set to
3 seconds, and the gain is 25%/F°, then the derivative output is 25% of the error
for each degree of error and recalculates every 3 seconds.
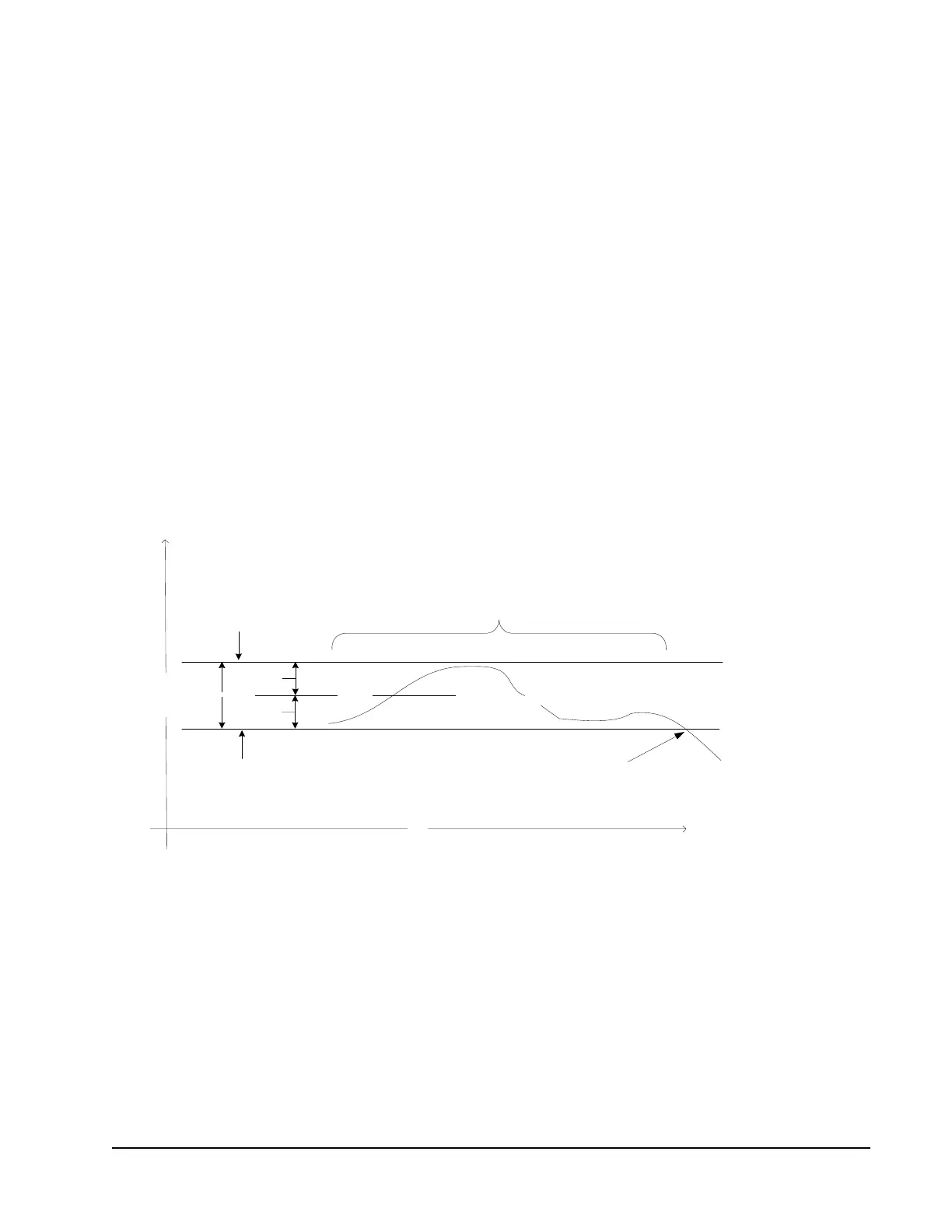
Deadband
The deadband is a range of input values. The center of the range is the setpoint.
While the input lies within the deadband, deviations from the setpoint are not
calculated as errors. The deadband is the range of values that are close enough to
the setpoint that their effect is unnoticeable.
If the deadband is equal to
1
/
2
x to the setpoint +
1
/
2
x, then the deadband extends
from the setpoint -
1
/
2
x to the setpoint +
1
/
2
x. The maximum amount of deviation
allowed is ±
1
/
2
x. See Figure 25.
When you use deadbands, it reduces mechanical wear and tear on moving parts
because the mechanical parts no longer oscillate to accommodate trivial errors.
Setpoint
x
0.5x
0.5x
Input
As soon as the input exceeds the
deadband, the PID loop will sense
an error at its input. Whatever the
PID outputs will do next, depends
on the PID loop settings.
As long as input stays within the deadband, the error
will be zero. As long as the error is zero, the PID loop
will not change its output signal.
Deadband with Value of x
M
a
g
n
i
t
u
d
e
Time
Deadband Limits
Deadband Limits
Figure 25: Effect of Deadband upon PID Loop Error
 Loading...
Loading...