280 JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
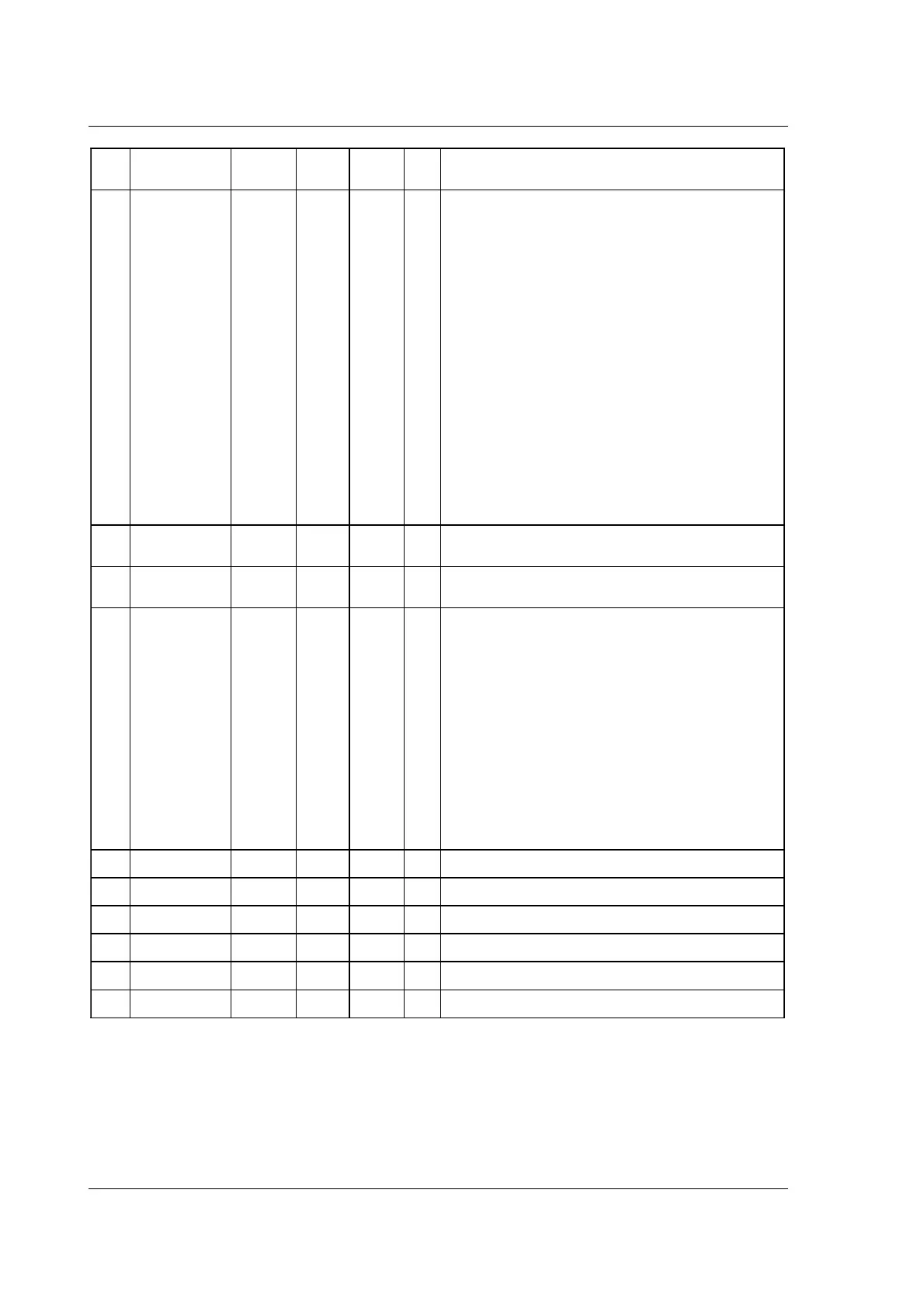
12.3 Motor registers MAC400 - 4500
TT1505GB
Reg.
Nr.
Firmware /
MacRegIo
Name
MacTalk
Name
Range/
Default
Size /
Access
Unit
Description
39
HW_SETUP
(continued from last
page)
(not
present)
Na /
9
Word /
RW
-
Bit 13, PULSE_8000
If set, rescale the 8192 encoder pulses to 8000 for MAC800
compatibility and better Vel-filter performance
Bits 14..15: reserved
Bit 16, DIRCDWR
Direction signal for the MultiFuncIo2 A channel (or both A and
B?)
Bit 17, SELINDEX
Not used -
prepared to select between encoder A or Index
signal -> MultF.
Bit 18, ALWAYS_COOL
Bit 19, POSITION_CAPTURE_UP
Used to enable SW position capture based on analogue input
rising edge
Bit 20, POSITION_CAPTURE_DN
Used to enable SW position capture based on analogue input
falling edge
Bit 21, PULSE_8000
If set, rescale the 8192 encoder pulses to 8000 for MAC800
compatibility and better Vel-filter performance
Bit 22, ENC_SCALING
Reserved for freely selectable encoder scaling.
Bit 23, SBUF_2048
Set to use a sample buffer length of 2048. Use 512 if not set
(backwards compatible).
40
V_HOME
(not
present)
Na /
-138
Word /
RW
-
Velocity to use during a zero search operation (Homing
operation). After the operation has completed, the drive will go
back to using the regular V_SOLL.
41
T_HOME
present)
Na /
341
Word /
RW
-
Torque to use during a zero search operation (Homing
operation). After the operation has completed, the drive will go
back to using the regular T_SOLL.
42
HOME_MODE
(not
present)
Na /
0
Word /
RW
-
Defines if the motor should start a zero search immediately after
start up, as well as the type of zero search to perform when a
FastMac command is received.
Bits 7..0 define the zero search mode the motor should start up
in. If this value is zero, the motor will not perform a zero search
at startup, but will start up in the mode selected by Reg37,
START_MODE. See bits 15..8 below for an exception!
Bits 15..8 define what mode the motor will set when it receives
a FastMac command (96+16). NOTE that if all these bits are
non-zero the motor will start up in passive mode instead of
starting in START_MODE!
Bit 16 is set after a zero search has completed, and can thus be
used to test if the motor has performed a zero search at least
once after +24V was last turned on.
After a zero
search has completed, the motor will always
change into the mode defined by Reg 37, START_MODE
(unless an error occurs that will stop the motor and set
ERR_STAT bit(s)).
43
P_REG_P
(not
present)
0-8
/
0
Word /
RW
-
When set to 1..8, copies one of POS0..POS7 to P_SOLL, then
resets to 0
44
V_REG_P
(not
0-8
/
0
Word /
RW
-
When set to 1..8, copies one of VEL0..VEL7 to V_SOLL, then
resets to 0
45
A_REG_P
(not
0-4
/
0
Word /
RW
-
When set to 1..4, copies one of ACC0..ACC3 to A_SOLL, then
resets to 0
46
T_REG_P
(not
0-4
/
0
Word /
RW
-
When set to 1..4, copies one of TQ0..TQ3 to T_SOLL, then
resets to 0
47 L_REG_P
(not
0-4 /
0
Word /
RW
- When set to 1..4, copies one of LOAD0..LOAD3 to KVOUT then
resets to 0
48 Z_REG_P
(not
0-4 /
0
Word /
RW
- When set to 1..4, copies one of ZERO0..ZERO3 to INPOSWIN,
then resets to 0