64 JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors
3.5 CiA® DSP-402 drive profile
Homing mode
In this mode different homing sequences can be initiated. The home sensor must be con-
nected to the AIN input on the module. If end limit sensors are used during the homing
sequence, then the sensors should be connected to the appropriate inputs, and they
must be enabled via object 0x2011 sub index 11. In the MAC motors the module inputs
is used.
In the MIS/MIL motors the registers 125 (I/O active level and I/O type), and 132 (home
input mask) have to be correctly set up prior to use. Do this setup by object 0x2012 or
in MacTalk in the ‘I/O Setup’ tab.
The torque limit used during homing is selected via object 0x2100. The unit of this object
is the same as other torque objects, e.g. object 0x6072.
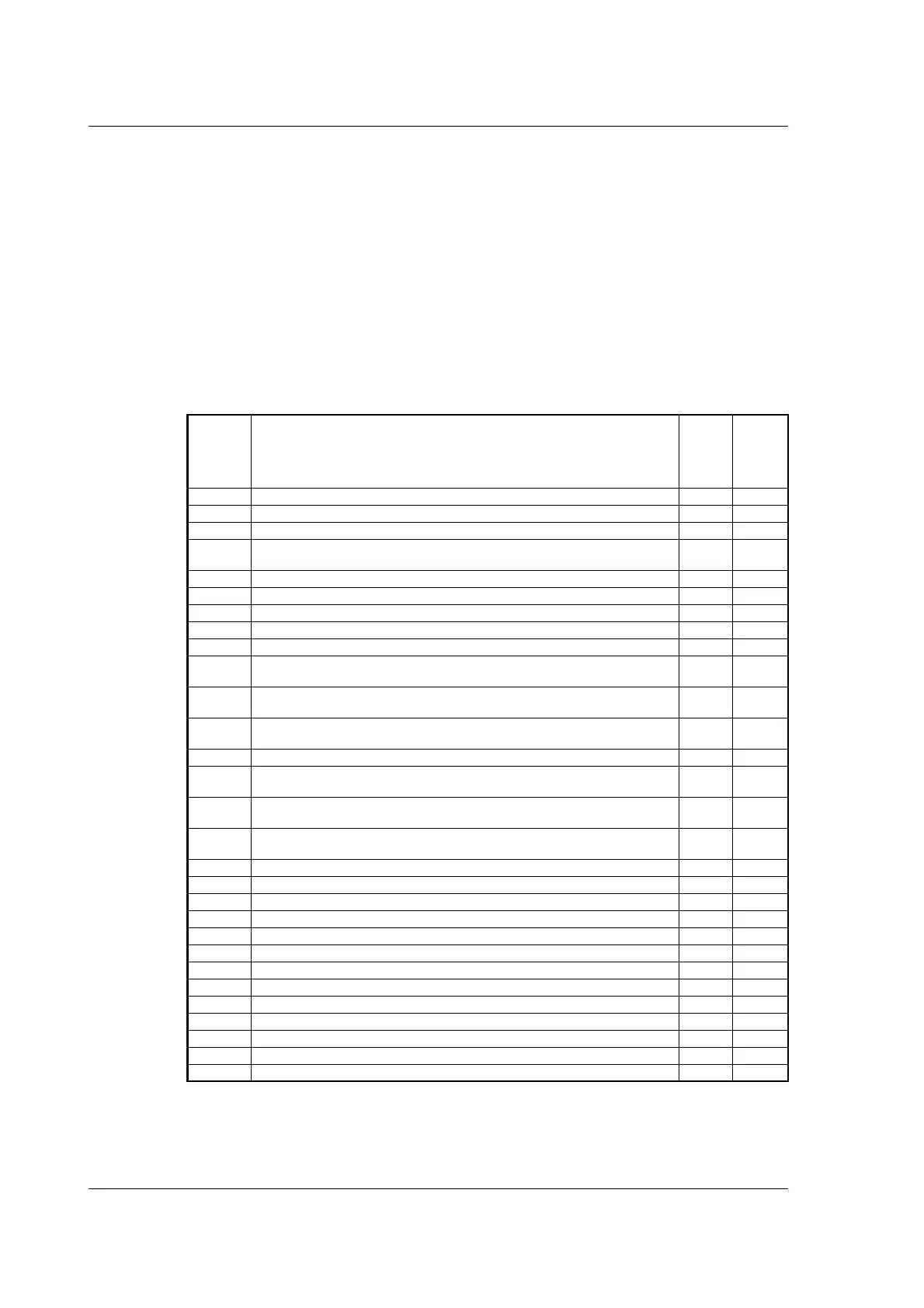
The MAC00-ECx module and the MIS/MILxxxxxxECxxxx supports the following homing
methods:
For a comprehensive description of the homing modes 3-37, please consult the CiA
DSP402 version 3.0.
Method Description Avail-
able in
MAC
Avail-
able
in MIS
/MIL
-4 Torque homing in positive direction. X X
-3 Torque homing in negative direction. X X
-2 Torque homing in positive direction and afterwards homing on the index pulse. X -
-1
Torque homing in negative direction and afterwards homing on the index
pulse.
X -
0-2 Not supported. - -
3 Homing on positive home switch and index pulse to the left. X -
4 Homing on positive home switch and index pulse to the right. X -
5 Homing on negative home switch and index pulse to the left. X -
6 Homing on negative home switch and index pulse to the right. X -
7
Start positive (unless home switch is active), reverse on home switch active,
stop at index.
X -
8
Start positive (unless home switch is active), stop at first index after active
home switch.
X -
9
Start positive, reverse on limit switch, stop at first index after active home
switch.
X -
10 Start positive, reverse on limit switch, reverse at homeswitch, stop at index. X -
11
Start negative (unless home switch is active), reverse on home switch active,
stop at index.
X -
12
Start negative (unless home switch is active), stop at first index after active
home switch.
X -
13
Start negative, reverse on limit switch, stop at first index after active home
switch.
X -
14 Start negative, reverse on limit switch, reverse at home switch, stop at index. X -
15-18 Not supported. - -
20 Homing on positive home switch. X X
22 Homing on negative home switch. X X
24 Start positive (unless home switch is active), stop at active home switch. X -
26 Start positive, reverse on limit switch, stop at active home switch. X -
28 Start negative (unless home switch is active), stop at active home switch. X -
30 Start negative, reverse on limit switch, stop at active home switch. X -
31, 32 Not Supported - -
33 Start negative, stop at index X -
34 Start positive, stop at index X -
35 Current position = home position (obsolete) X X
37 Position actual = Home offset X X