JVL Industri Elektronik A/S - User Manual - Ethernet for MAC and MIS motors 65
3.5 CiA® DSP-402 drive profile
Please note that you should always use a home offset (object 0x607C) when using torque
homing. This is to ensure that the motor moves away from the end limit. The sign of the
home offset should be the opposite of the homing direction. For example, when using a
negative homing direction, the home offset could be 5000.
Cyclic Synchron Position mode (csp)
This mode is used when synchronization between several drives are needed in position
mode. The default PDO addresses this mode. It is the preferred mode for the NC sys
-
tem in TwinCAT. When using CSP mode it is highly recommneded to use Distributed
Clock, in order not to loose any cyclic frames.
If wanting to enable this mode as startup mode in TwinCAT then follow the steps below:
WARNING: The CSP mode is NOT recommended for MAC050-141, as these
motors do not support Distributed Clock, and have a minimum cycle time of
16ms when using DSP-402.
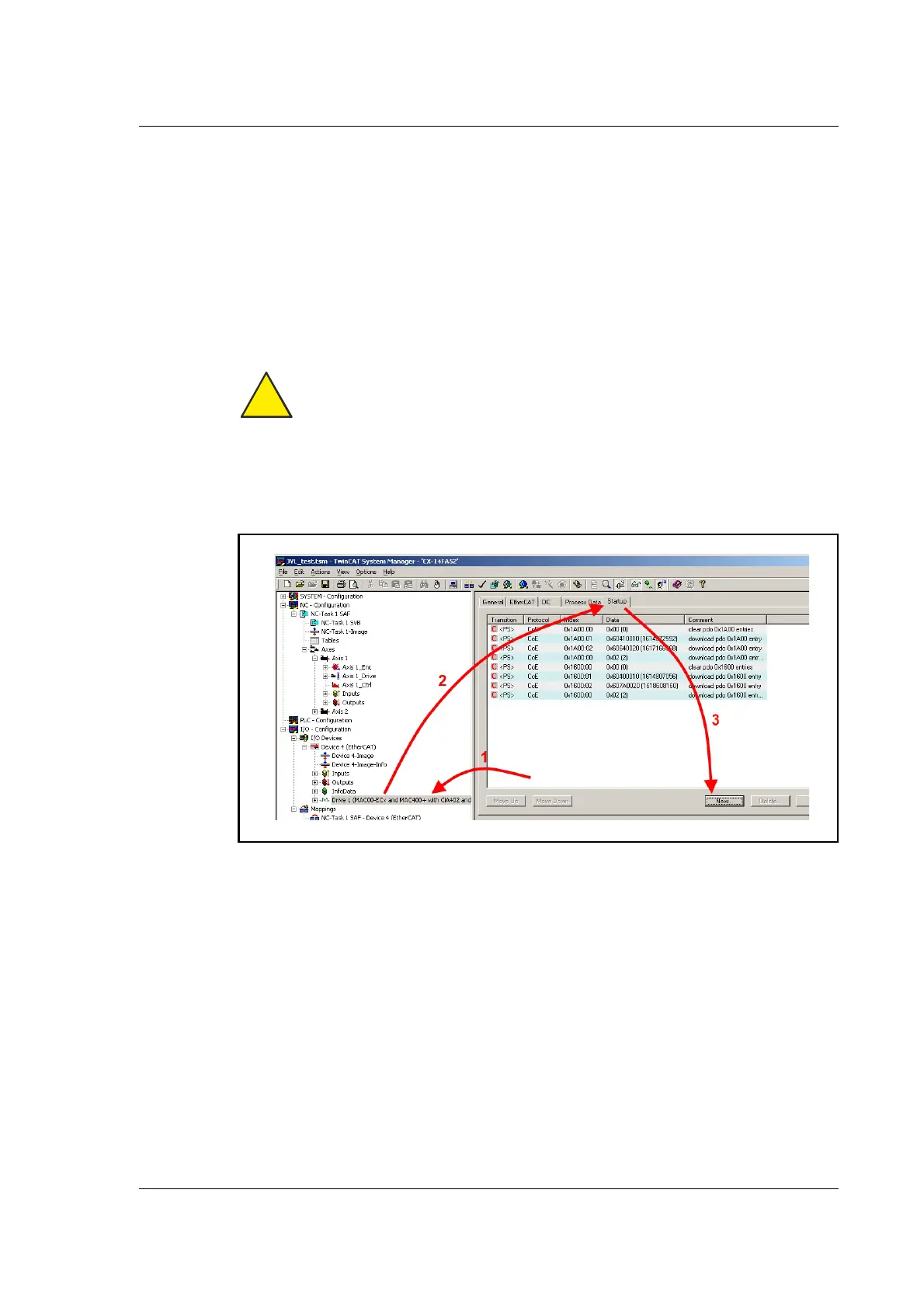
Step 1-3.
Select the drive and press the “Startup” tab, then press the “New” button, as shown in
the below picture.
!