Hardware installation manual of the ES-DH series drives
12
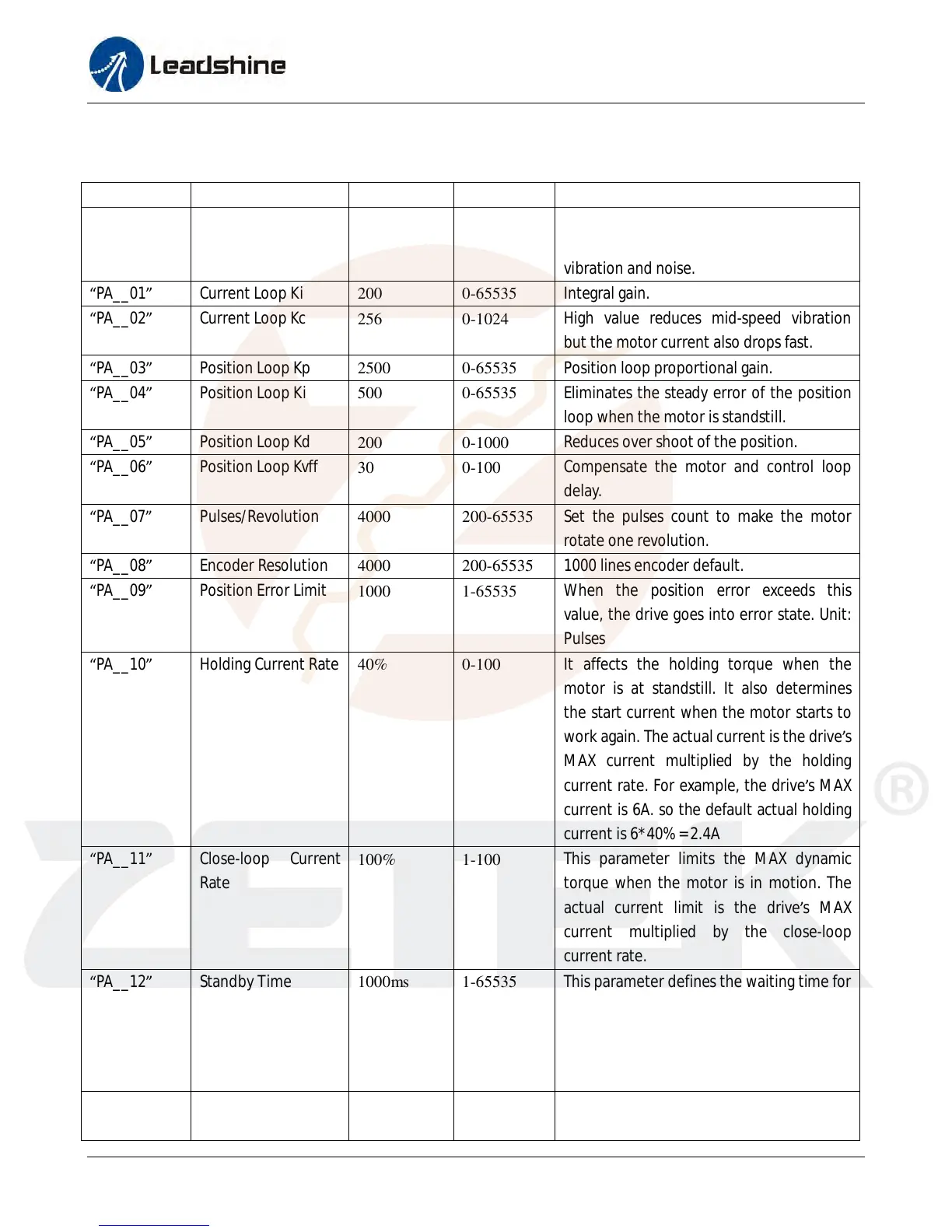
Edit Parameter Mode
In this mode, the parameter is identified by the code “PA__XX” as shown in the following table.
Display Code
Name Default Value
Range Description
“PA__00” Current Loop Kp
1000 0-65535
Proportional gain. Increase it make current
rise fast. But high value may leads to big
vibration and noise.
“PA__01” Current Loop Ki
200 0-65535
Integral gain.
“PA__02” Current Loop Kc
256 0-1024
High value reduces mid-speed vibration
but the motor current also drops fast.
“PA__03” Position Loop Kp
2500 0-65535
Position loop proportional gain.
“PA__04” Position Loop Ki
500 0-65535
Eliminates the steady error of the position
loop when the motor is standstill.
“PA__05” Position Loop Kd
200 0-1000
Reduces over shoot of the position.
“PA__06” Position Loop Kvff
30 0-100
Compensate the motor and control loop
delay.
“PA__07” Pulses/Revolution
4000 200-65535
Set the pulses count to make the motor
rotate one revolution.
“PA__08” Encoder Resolution
4000 200-65535
1000 lines encoder default.
“PA__09” Position Error Limit
1000 1-65535
When the position error exceeds this
value, the drive goes into error state. Unit:
Pulses
“PA__10” Holding Current Rate
40% 0-100
It affects the holding torque when the
motor is at standstill. It also determines
the start current when the motor starts to
work again. The actual current is the drive’s
MAX current multiplied by the holding
current rate. For example, the drive’s MAX
current is 6A. so the default actual holding
current is 6*40% = 2.4A
“PA__11” Close-loop Current
Rate
100% 1-100
This parameter limits the MAX dynamic
torque when the motor is in motion. The
actual current limit is the drive’s MAX
current multiplied by the close-loop
current rate.
“PA__12” Standby Time
1000ms 1-65535
This parameter defines the waiting time for
the drive entering into standby mode when
there is no pulse input to the drive. In
standby mode, small position error will be
ignored.
“PA__13” Pulse Filter
0 0 or 1
0----Disable Pulse Filter
1----Enable Pulse Filter
www.servosystem.ru +7(495) 407-01-02