8400 StateLine C | Operating instructions
Adapting the application individually
Implementing more additional functions in the signal flow
72 L from Firmware V06.00 - DMS 1.1 EN - 11/2011
Parameter
Parameter Name Info/Lenze setting
Process controller
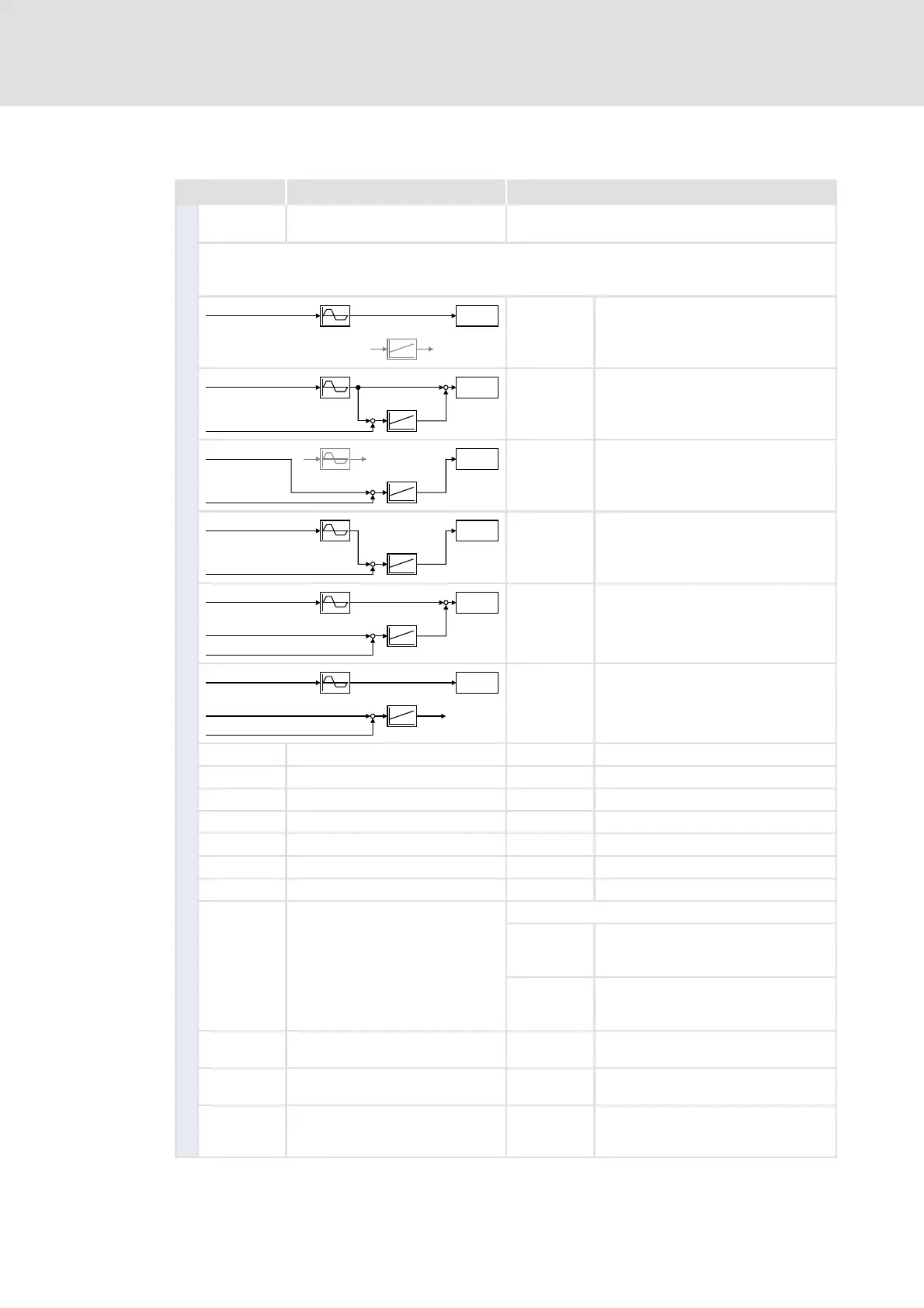
C00242 Operating mode - process controller Selection of the operating mode of the PID process
controller
Basic signal flow
(NSet = main setpoint generator/ramp function generator, MCTRL = motor control, PCTRL = PID process
controller)
0Off
• MCTRL setpoint = main setpoint (PID
controller is not in the circuit)
1nNSet + nNSet_PID
• MCTRL setpoint =
main setpoint + PID output
• PID setpoint = main setpoint
2nSet_PID
• MCTRL setpoint = PID output
• PID setpoint = main setpoint
3nNSet_PID
• MCTRL setpoint = PID output
• PID setpoint = main setpoint
4 nNSet + nSet_PID
• MCTRL setpoint =
main setpoint + PID output
• PID setpoint = own setpoint
5 nNSet || nSet_PID
• MCTRL setpoint = main setpoint
• PID setpoint = own setpoint
C00222 L_PCTRL_1: Vp 1.0 Gain factor Vp
C00223 L_PCTRL_1: Tn 400 ms Reset time Tn
C00224 L_PCTRL_1: Kd 0.0 Differential component Kd
C00225 L_PCTRL_1: MaxLimit 199.99 % Maximum output value
C00226 L_PCTRL_1: MinLimit -199.99 % Minimum output value
C00227 L_PCTRL_1: Acceleration time 0.010 s Acceleration time for the output value
C00228 L_PCTRL_1: Deceleration time 0.010 s Deceleration time for the output value
C00233 L_PCTRL_1: Root function Use of the root function in the actual value input
0 Root function inactive
• The actual value nAct_a remains
unchanged for further processing
1 Root function active
• The root is extracted of the actual
value nAct_a for further processing
C00243 L_PCTRL_1: Accel. time influence 5.000 s Acceleration time for showing the PID
output value
C00244 L_PCTRL_1: Deceleration time
influence
5.000 s Deceleration time for masking out the
PID output value
C00247 L_PCTRL_1: ActEqSet window 2.00 % Window for comparison operation
"actual value = setpoint" of the PID
process controller
0&75/
16HW 3&75/
0DLQVHWYDOXH )HHGIRUZDUGFWUOYDO
0&75/
16HW 3&75/
0DLQVHWYDOXH
3,'DFWXDOYDOXH
)HHGIRUZDUGFWUOYDO
0&75/
16HW 3&75/
0DLQVHWYDOXH
3,'DFWXDOYDOXH
0&75/
16HW 3&75/
0DLQVHWYDOXH
3,'DFWXDOYDOXH
0&75/
16HW 3&75/
0DLQVHWYDOXH
3,'DFWXDOYDOXH
)HHGIRUZDUGFWUOYDO
3,'VHWYDOXH
0&75/
16HW 3&75/
0DLQVHWYDOXH
3,'DFWXDOYDOXH
)HHGIRUZDUGFWUOYDO
3,'VHWYDOXH