49
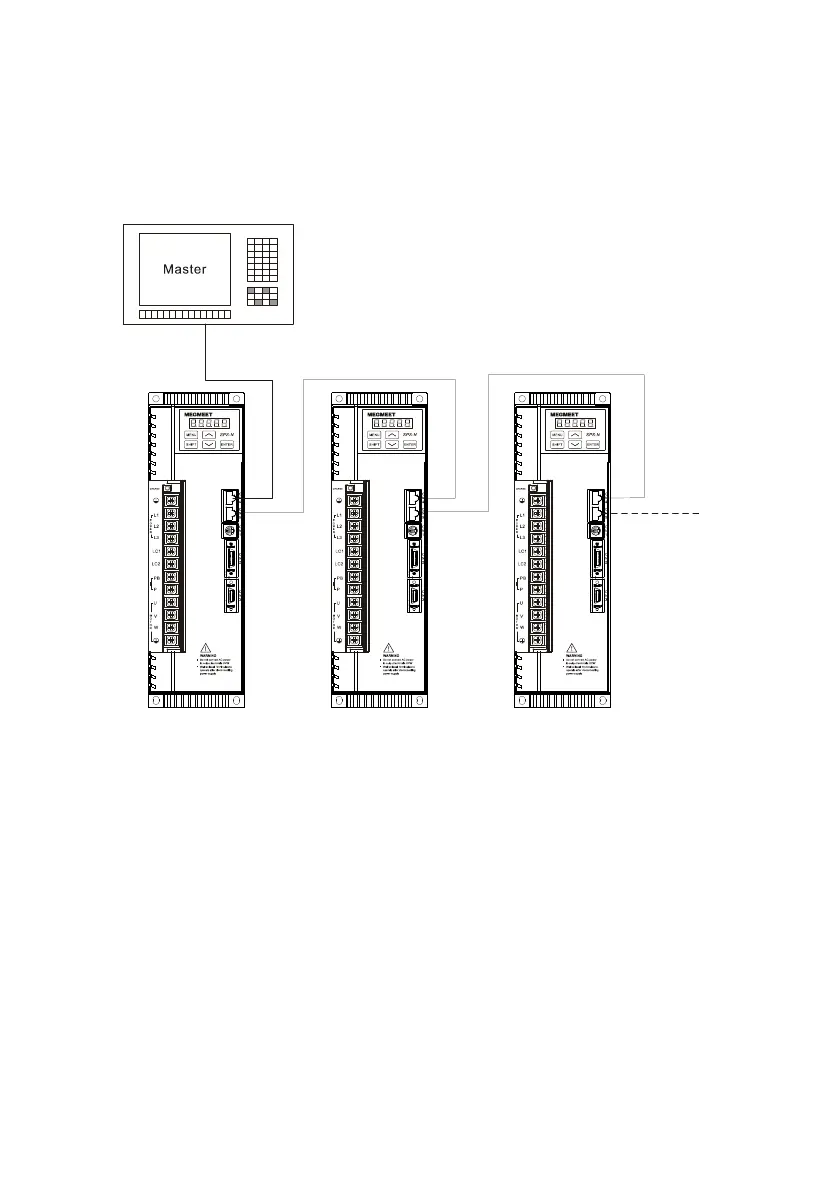
2. Network topology
EtherCAT network is generally composed of one master station (such as EtherCAT controller) and several slave
stations (such as servo controllers, bus terminals). Each EtherCAT slave station has two standard Ethernet interfaces.
The network wiring is shown in the following figure.
3. EtherCAT network reference model
Among all the application layer protocols of EtherCAT, SPS-NE uses IEC 61800-7 (CiA402) - CANOpen motion control
sub-protocol.
The following figure shows the EtherCAT communication structure based on the CANOpen application layer.
 Loading...
Loading...