55
7. Distributed clock
In the EtherCAT system, the distributed clock is initialized, configured, started and compensated for clock drift by the
master station. The distributed clock at the slave station is realized by the ESC control chip, providing the interruption
signal and clock information. The distributed clock can also be used to record the input time of the latch input signal.
The distributed clock allows all EtherCAT devices to run synchronously by using the same system time. Slave devices
can generate sync signals based on the synchronous system time.
The SPS-NE series servo drive supports the DC synchronous mode, and the synchronous cycle is controlled by SYNC0.
The synchronous cycle varies according to different motion modes. Typical cycles include 250 us, 500 us, 1 ms and 2
ms. SPS-NE supports 500 us at minimum.
CiA402 device control (device conventions)
Device control is used to realize all running functions of the drive, including the state machine control and the
operation mode. The master station controls the drive through “control word”, and learns the drive status through
“status word”.
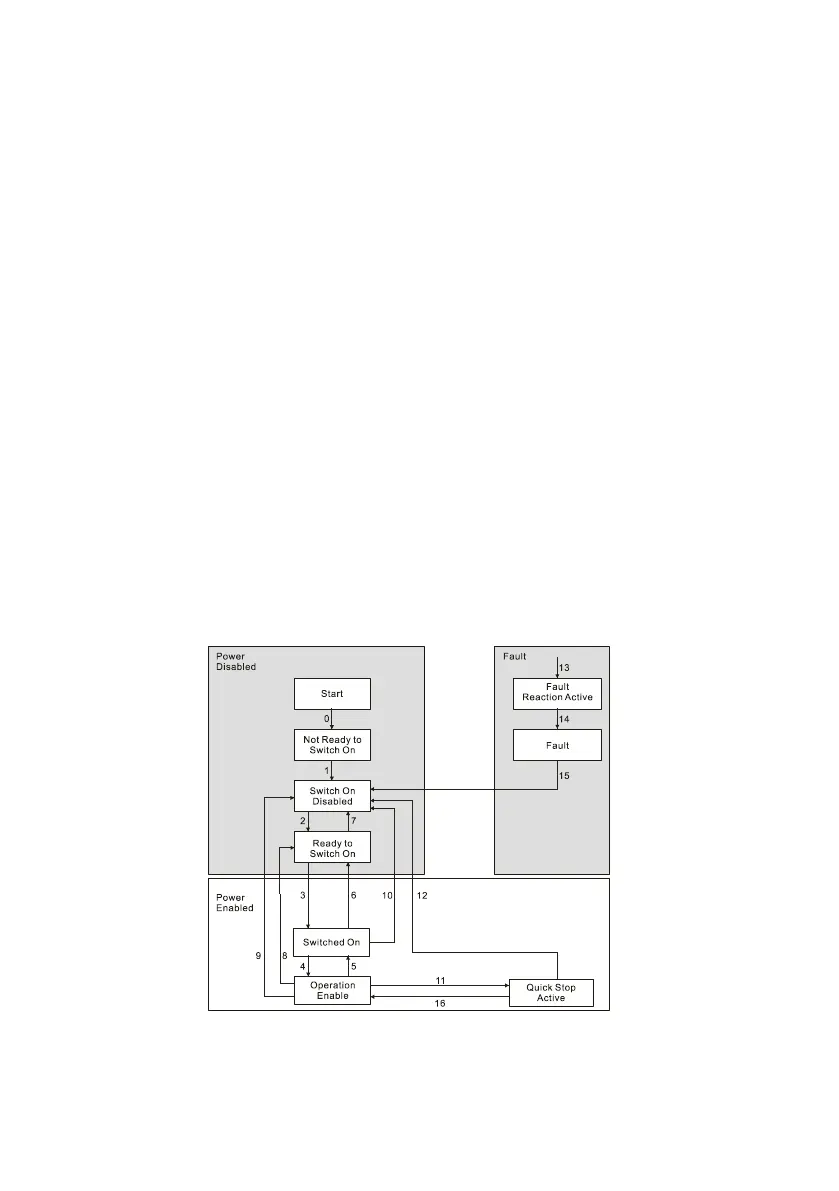
1. CoE state machine
The CoE state machine is shown in the following diagram.
As shown in the above diagram, the state machine can be divided into “Power Disabled”, “Power Enabled” and
“Fault”.
 Loading...
Loading...