83
Chapter 6 Troubleshooting
Abnormalities and solutions
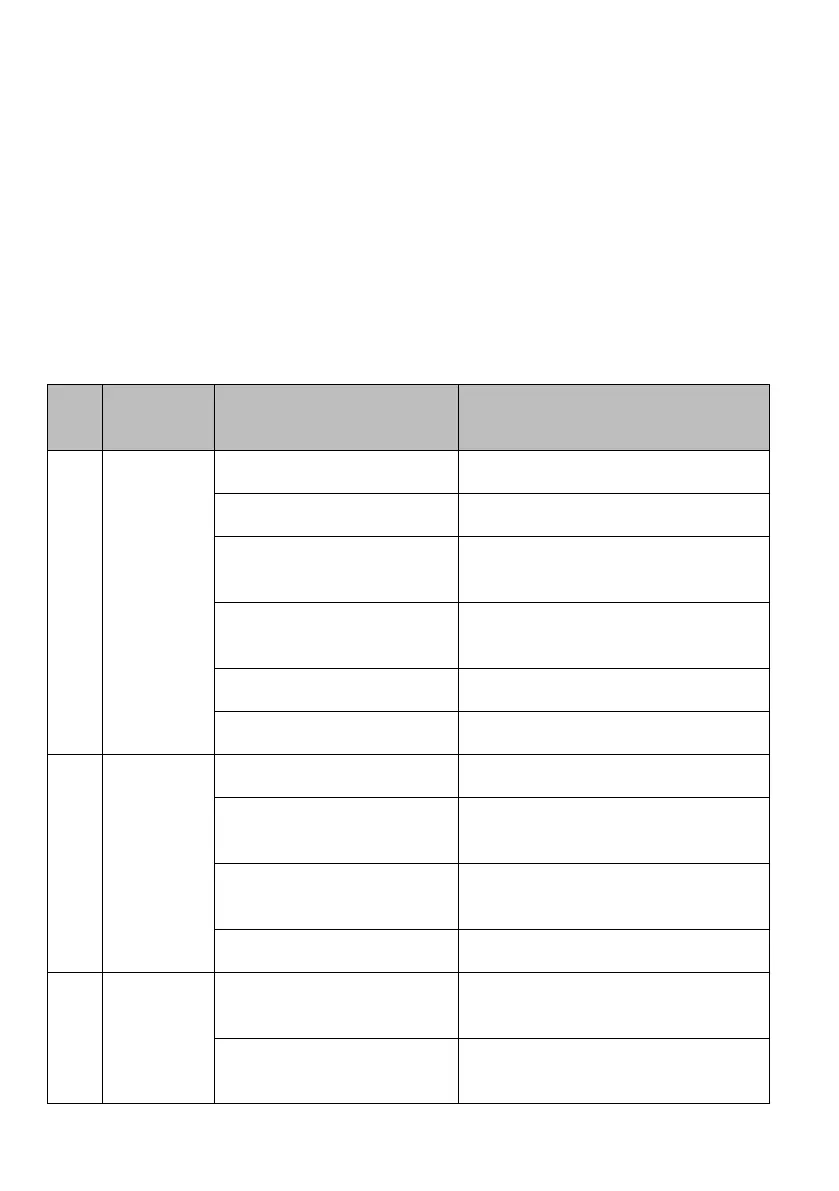
All possible fault types of SPS-NE are included in the Table 6-1, totaling 41. Before seeking for service, the user can
perform self-check according to this table and record the fault symptoms in details. This will help a lot when you
contact the sales personnel for technical support.
Table 6-1 Fault types and solutions
Servo drive
overcurrent
during
acceleration
The acceleration time is too short.
Prolong the acceleration time
The motor parameters are incorrect.
Perform auto-tuning of motor parameters
When instantaneous stop happens,
the rotating motor is restarted.
Set the startup mode P08.00 to startup after
speed tracking
Coded disc fault occurs when PG is
running.
Check the coded disc and its wiring
The servo drive power is too low.
Use a servo drive with higher power
The V/F curve is improper.
Adjust the V/F curve and manual torque boost
Servo drive
overcurrent
during
deceleration
The deceleration time is too short.
Prolong the deceleration time
There is potential energy load or the
load inertial torque is large.
Add additional appropriate dynamic braking
components
Encoder fault occurs when PG is
running.
Check the encoder and its wiring
The servo drive power is too low.
Use a servo drive with higher power
Servo drive
overcurrent at
constant speed
The acceleration/deceleration time is
too short.
Prolong the acceleration/deceleration time
appropriately
Sudden load change or abnormal
load
 Loading...
Loading...