89
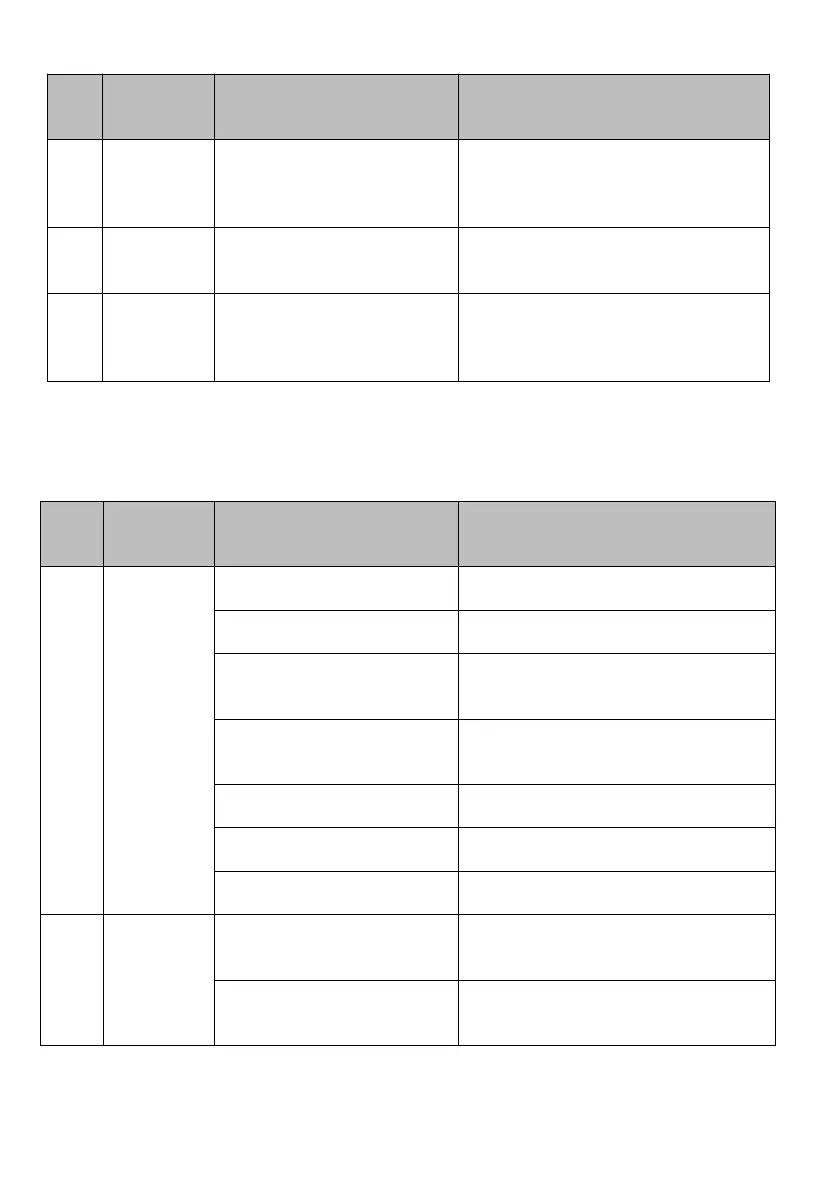
xml file is not written into the
EEPROM of the slave (drive) ESC.
Write the xml file into the EEPROM of the slave
ESC properly
Overvoltage of
control voltage
After rectification, the direct voltage
is over 390 V.
Check whether the control power is normal
EtherCAT
parameter
mapping error
The address for parameter mapping
is not correct.
Ensure the mapping address is a valid drive
parameter address
All possible alarm types of SPS-NE are included in the Table 6-2. For details, refer to the P97 group setting. If the fault
automatically disappears during running, the servo drive will automatically return to the state before alarm.
Table 6-2 Alarm types and solutions
The motor parameters are incorrect.
Perform auto-tuning of motor parameters
Use a servo drive with higher power
The DC braking amount is too large.
Reduce the DC braking current and prolong the
braking time
When instantaneous stop happens,
the rotating motor is restarted.
Set the startup mode P08.00 to startup after
speed tracking
The acceleration time is too short.
Prolong the acceleration time
The grid voltage is too low.
The V/F curve is improper.
Adjust the V/F curve and torque boost
The motor overload protection factor
setting is incorrect.
Set the overload protection factor of the motor
correctly
The motor is blocked or the sudden
change of load is too large.
 Loading...
Loading...