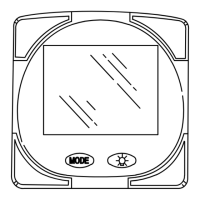
Speed
Speed data is covered during the setup wizard process, but changes to the way that VesselView obtains speed data can be
made at any time. Selection of the CAN bus that transmits speed data can be changed. A speed strategy using pitot and
paddlewheel sensors can be used on vessels that do not have a GPS receiver.
The speed source determines how speed data is obtained. A strategy utilizes pitot and paddlewheel data to establish the
vessel's speed. When strategy is selected, the pitot and paddlewheel data source engine must be selected. GPS utilizes the
data coming from the GPS unit to determine speed. When GPS is selected, the proper network BUS must be selected as the
source of GPS data to the VesselView.
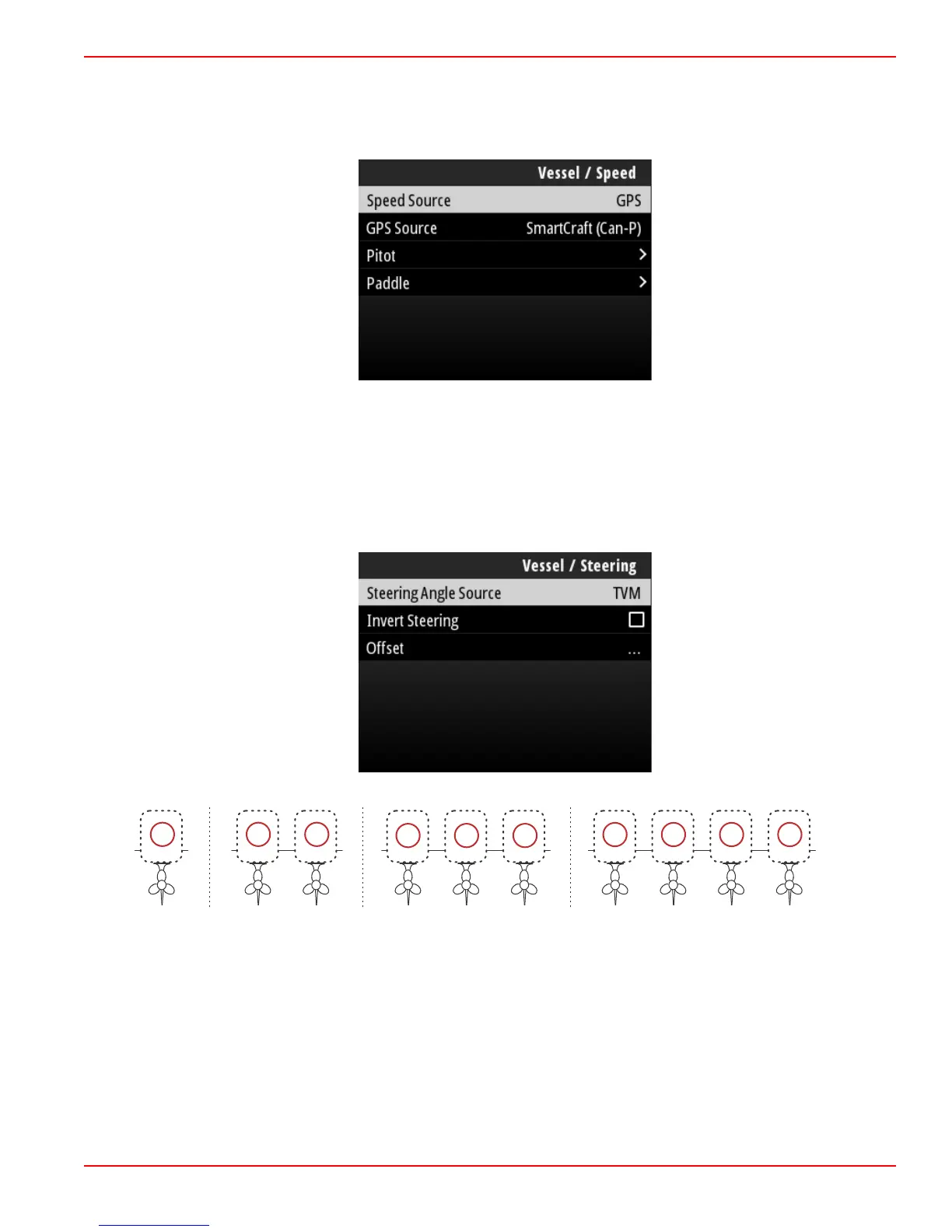
Steering
Steering source data can be selected to come from either the PCM or the TVM—thrust vector module, with options to display
the data on‑screen, to invert steering input, and to establish a steering offset degree.
Drive assignment options
a - PCM0 = starboard or starboard outer
b - PCM1 = port or port outer
c - PCM2 = starboard inner or center
d - PCM3 = port inner
The Invert steering option is helpful when there is a VesselView which is rear‑facing. In this case the steering data will match
the operator's point of view.
Section 3 - Main Menu Selections
90-8M0124182 eng DECEMBER 2017 Page 51
 Loading...
Loading...