4 SAFETY MONITORING FUNCTIONS
Safety Monitoring Functions 4-47
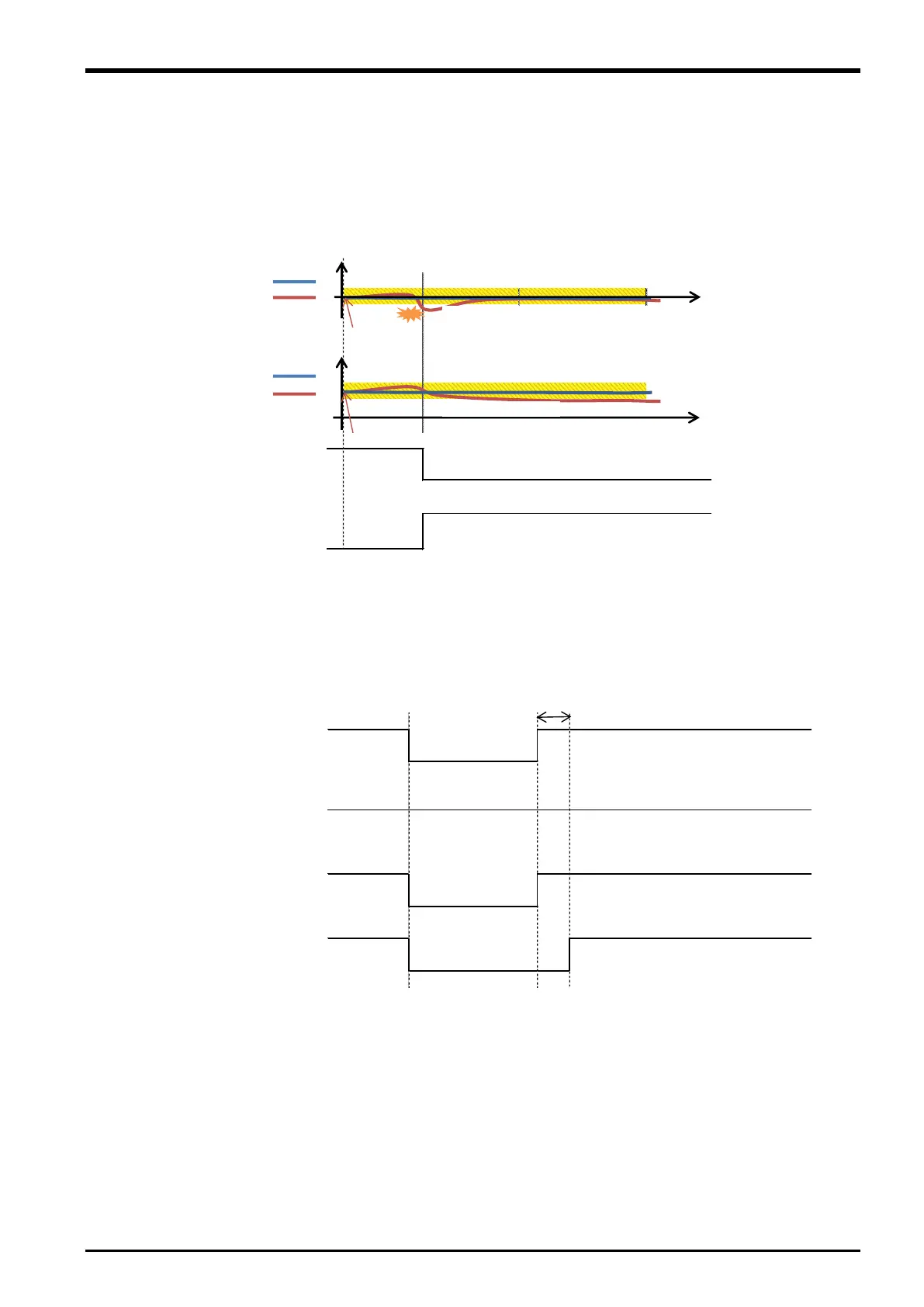
(d) When the robot moves during the SOS monitoring
When one of the following items exceeds the allowable range during the SOS monitoring, the SS1
function stops the robot.
(i) Joint position command
(ii) Joint position FB
(iii) Joint speed command
(iv) Joint speed FB
For (i) and (ii), the values are recorded at the beginning of the SOS monitoring and the judgments are
made based on the differences between the values and the current ones.
関節速度指令
関節速度FB
速度許容値
0
関節位置指令
関節位置FB
位置許容値
SOS監視開始時の位置
有効
無効
STO監視 有効
無効
Fig. 4-31: When the robot moves during the SOS monitoring
(e) When servos are turned off during the SOS monitoring
Turning off servos when the SS2 command is enabled disables the SS2 monitoring and the SOS
monitoring. Turning on the servos again with the SS2 command enabled will enable the SOS monitoring
200 ms after the servos are turned on.
Fig. 4-32: When servos are turned off during the SOS monitoring
Joint speed command
Joint speed FB
Joint position command
Joint position FB
Position at the beginning of the SOS monitoring
 Loading...
Loading...



