4 SAFETY MONITORING FUNCTIONS
Safety Monitoring Functions 4-65
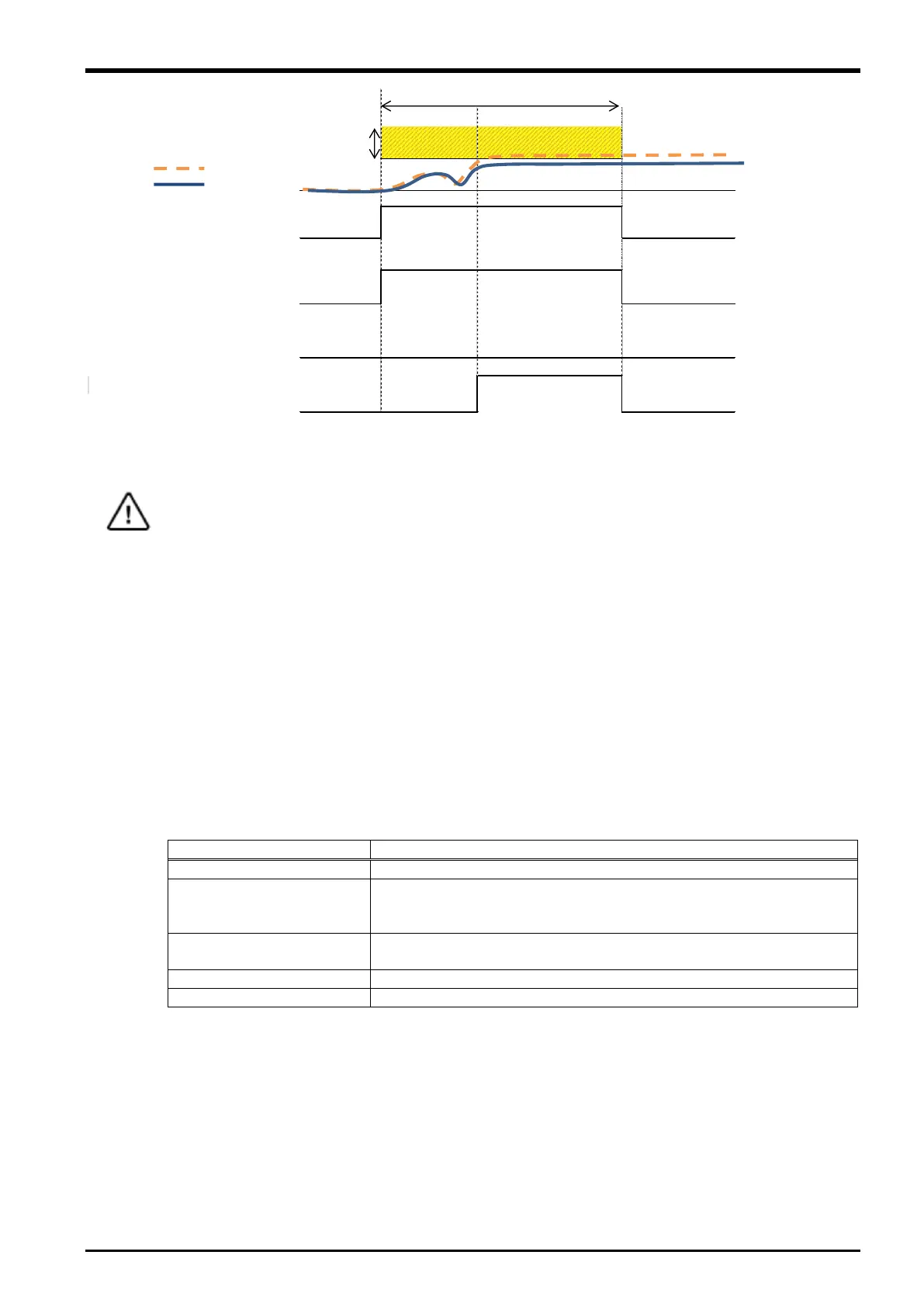
Fig. 4-54: Stop position prediction function
The function to stop the movement near the position monitoring plane works for operation
commands concerning the interpolation command or the jog operation. The function does
not work for correction commands of the compliance control, force sense control, or
tracking function.
Therefore, stopping operation commands near the position monitoring plane while these
functions are running may not prevent the robot from reaching the position monitoring
plane due to correction commands, causing an error.
③ When error H220m occurs in the SLP prior stop state
Depending on the monitoring position settings or how the robot is moving, a monitoring position may
enter a safeguarded space in the SLP prior stop state, causing error H220m. Setting a margin between
the predicted stop position and the safeguarded space prevents error H220m from occurring. Use
SPPFMG parameter to set the margin.
Table 4-11: Margin between the predicted stop position and the safeguarded space
Set a margin between the predicted stop position and the
safeguarded space to prevent error H220m from occurring in the SLP
What parameter settings
means
Margin (distance) between the predicted stop position and the
safeguarded space
0.00 to 1000.00 (unit: mm)
When the margin is set using SPPFMG parameter, the robot will stop before entering the safeguarded
space (SLP prior stop) according to the setting value. A monitoring position will not enter the safeguarded
space and thus error H220m will not occur.
Caution
 Loading...
Loading...



