4 SAFETY MONITORING FUNCTIONS
4-66 Safety Monitoring Functions
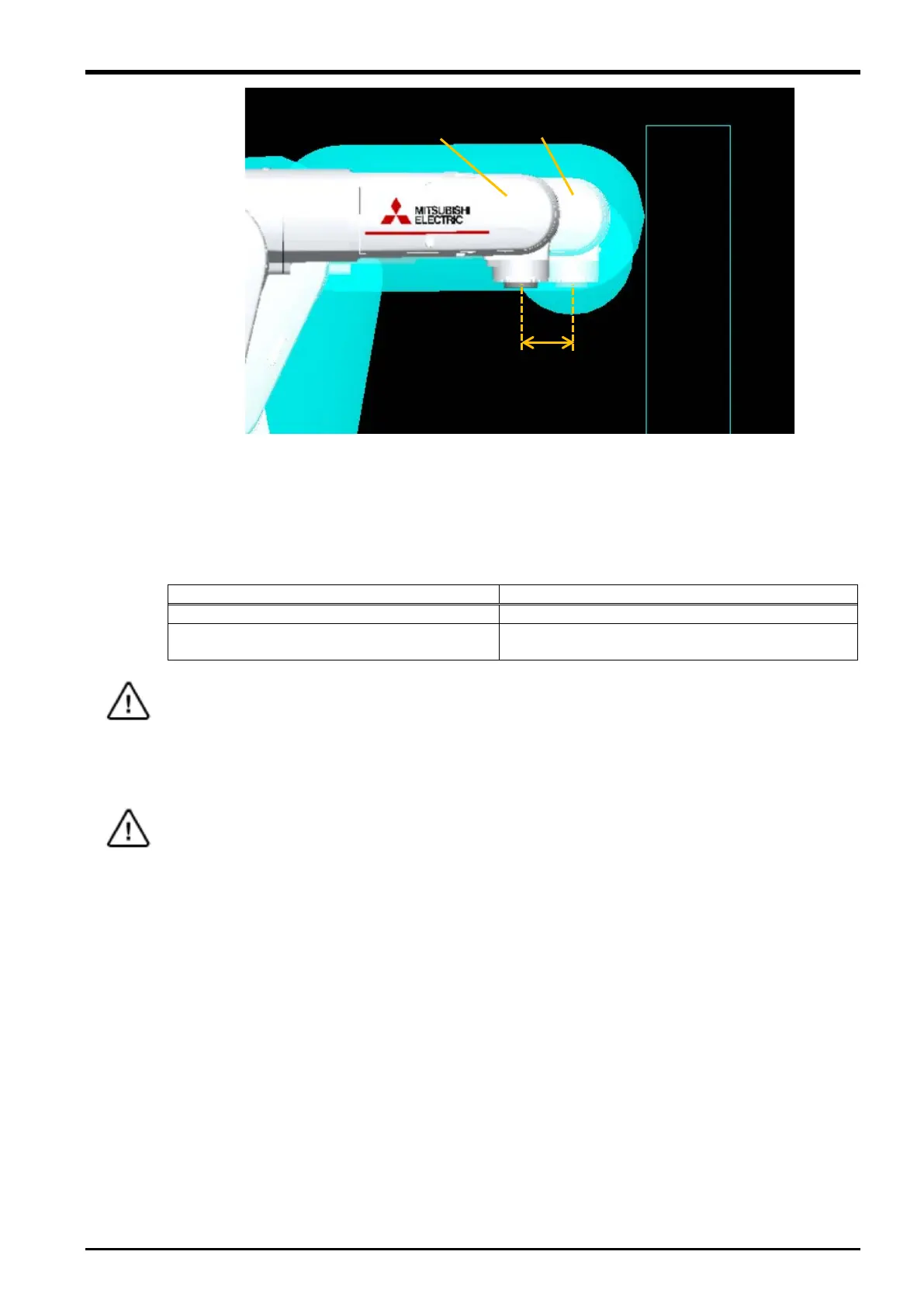
Fig. 4-55: SLP prior stop when the margin is set
SPPFMG parameter is available with software version of each device shown in the following table.
Table 4-12: Software version that supports SPPFMG parameter
RT ToolBox3/RT ToolBox3 Pro
(simulation function)
When a large value (for example, a value larger than the distance between the current
position and the safeguarded space) is set in SPPFMG parameter, the robot will enter
the SLP prior stop state immediately after the robot starts moving and its movement is
restricted. Set SPPFMG parameter appropriately.
Check state variable M_SlpPreStp to see whether the robot is in the SLP prior stop state.
When the simulation function of RT ToolBox3 or RT ToolBox3 Pro is used, setting
SPPFMG parameter to a value larger than the distance between the robot position at the
start of the simulation and the safeguarded space will cause error H220m at startup of
the simulation. In this case, change the SPPFMG parameter setting or the SLP monitoring
settings.
space
Caution
Caution
 Loading...
Loading...



