4 SAFETY MONITORING FUNCTIONS
Safety Monitoring Functions 4-67
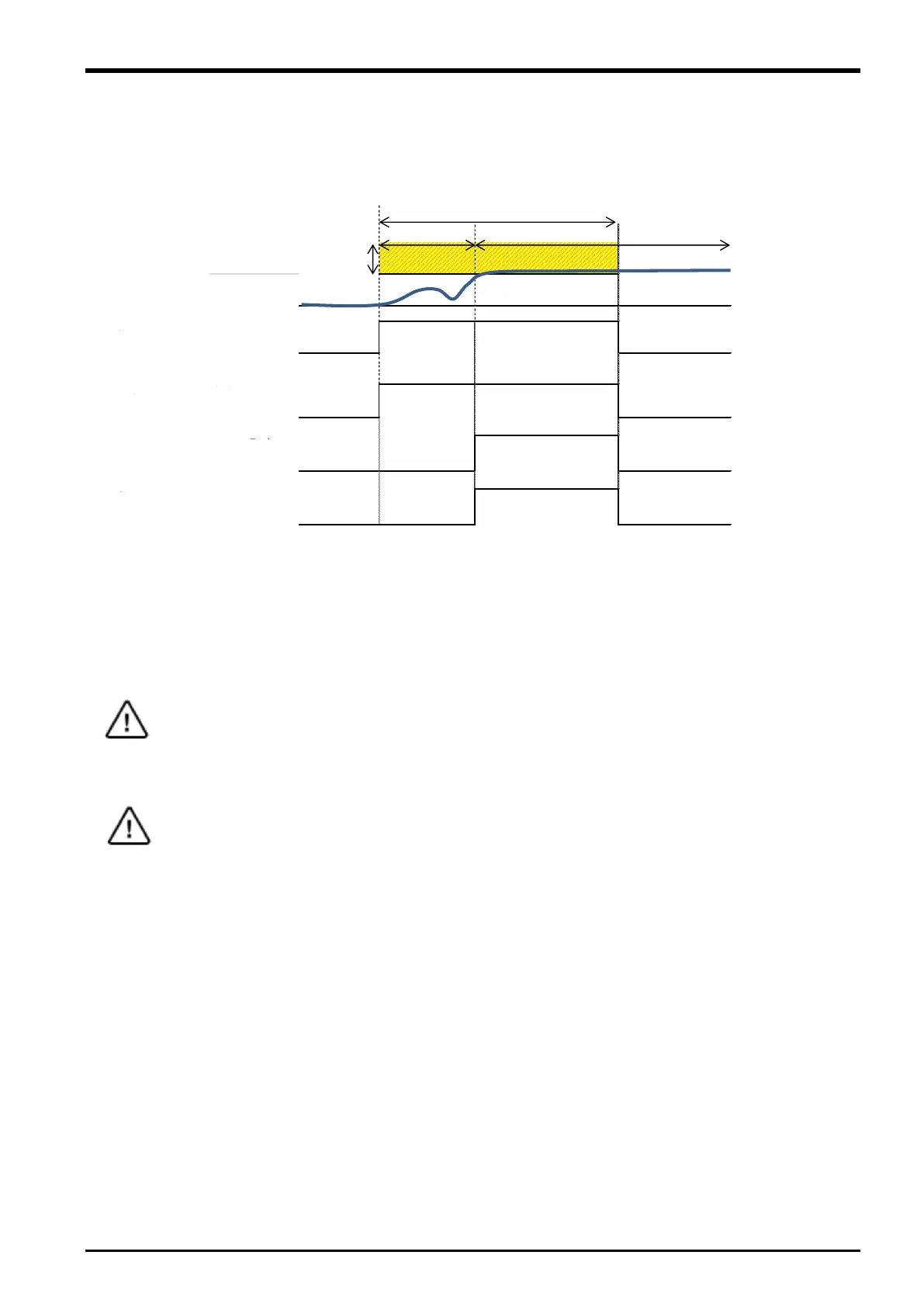
(d) When intrusion into an SLP restricted area is detected
Intrusion of one of the following items into an SLP restricted area causes error H220* (SLP robot position
error) and SS1 stops the robot.
(i) Position command (Whole arm and tools)
(ii) Position FB (Whole arm and tools)
Fig. 4-56: When intrusion into an SLP restricted area is detected
(e) When the robot is run by the jog operation
A buzzer goes off from the teaching pendant to notify that a safety monitoring plane and safety monitoring
area are close, and the robot stops. If the function detects that any one of the monitoring positions has gone
across the plane, error H220* occurs and the robot stops by turning off the servos.
The function to stop the movement near the position monitoring plane does not work for
the spline interpolation command (MvSpl, EMvSpl commands) or the real-time external
control (Mxt command).
When no errors are found, if the brake release operation allows the robot to go across
the position monitoring plane, error H220m occurs and the brake is applied at the same
time. While an error is occurring, the brake is not applied even if another error occurs
while the brake is released.
Caution
Caution
 Loading...
Loading...



