FX
3U
/FX
3UC
Series PLC User's Manual - Analog Control Edition
PID Instruction (FNC 88)
G-15
3 Parameter
3.2 Details of Parameters
A
Common Items
B
FX
3UC
-4AD
C
FX
3U
-4AD-ADP
D
FX
3U
-4DA-ADP
E
FX
3U
-4AD-PT
-ADP
F
FX
3U
-4AD-TC
-ADP
G
PID Instruction
(FNC 88)
3.2.6 Differential gain (KD): (S3)+5
Setting range: 0 to 100[%]
PID control: Differential operation
The filter is applied on the output given by the differential operation.
Only the differential operation is affected by the differential gain (K
D).
• When the differential gain (K
D) is small, the output is immediately given with regard to changes in the
measured value (PV) caused by disturbance, etc.
• When the differential gain (K
D) is large, the output is given after a long time with regard to changes in the
measured value (PV) caused by disturbance, etc.
Important points
Set the differential gain (K
D) to "0", and then adjust the operation using the input filter (α).
If the output response is too close to the disturbance, increase the differential gain (K
D).
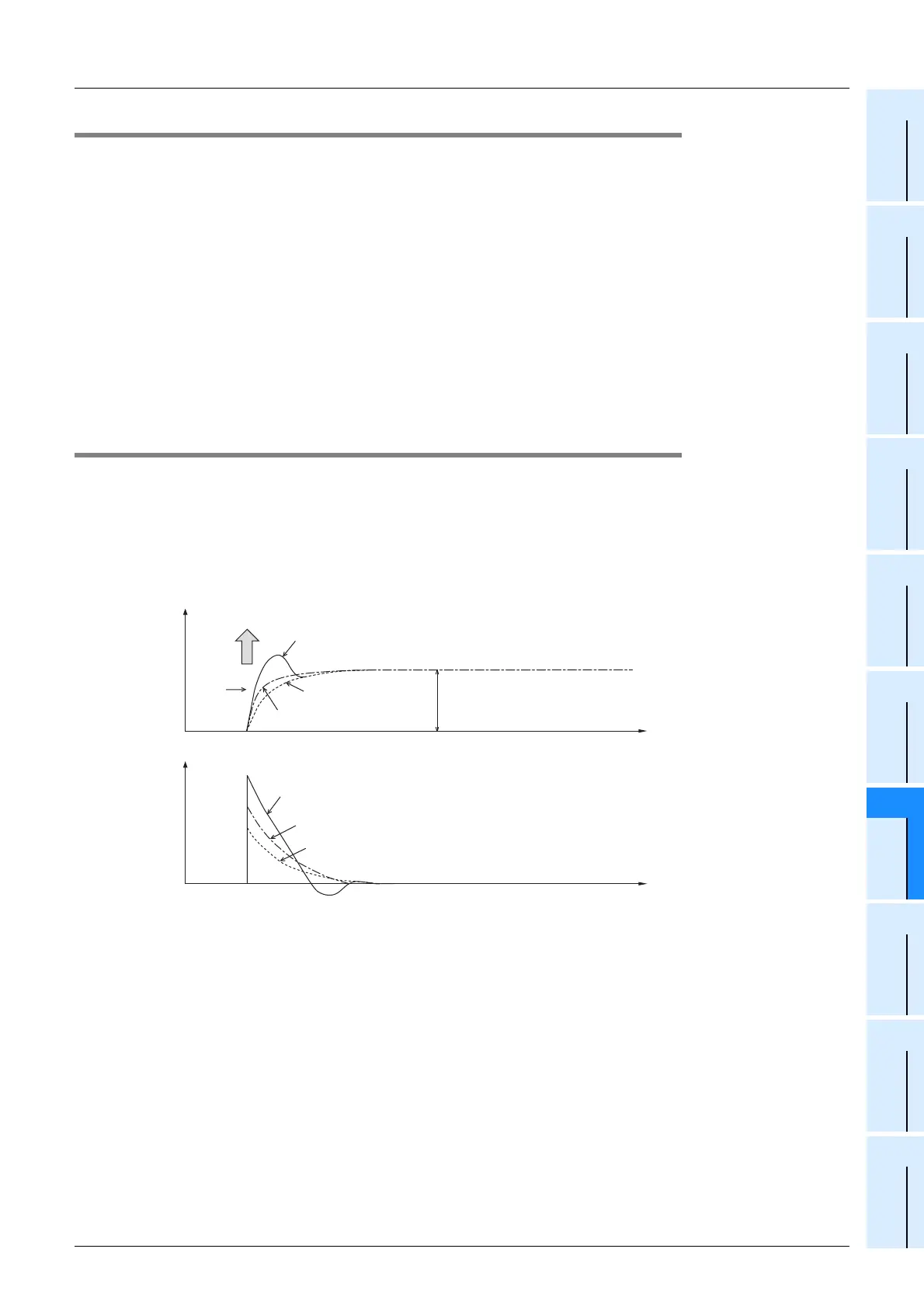
3.2.7 Differential time (TD): (S3)+6
Setting range: 0 to 32767 [× 10 ms]
PID control: Differential operation
Use the differential time (TD) to respond sensitively to fluctuations in the measured value (PV) caused by
disturbance, etc. and to minimize the fluctuation.
• When the differential time (T
D) is large, it becomes to prevent large fluctuation in the control target caused
by disturbance, etc.
• It is not always necessary to use the differential time (when disturbance is small, for example).
Time
Deviation (EV)
Disturbance
Deviation
Time
T
D3
(PID operation)
T
D3
(PID operation)
T
D2
(PID operation)
T
D1
(PID operation)
T
D2
(PID operation)
T
D1
(PID operation)
T
D3
> T
D2
> T
D1
Output (MV)

 Loading...
Loading...





