XPS-D Controller User Interface Manual
2. Using this screen, perform a data gathering with your current parameter settings:
1. Initialize and home the positioner, then move to the desired start position (set the
position in the “Absolute move” field on top righte and then click “Go”).
2. Under “Acquisition parameters”, define the gathering data: For the stage tuning,
it is recommended to gather only the following error and the current position.
3. Define the frequency divisor. The frequency divisor defines the sampling rate of
the gathering. A frequency divisor equal to one means one data point is gathered
every servo cycle. With most positioners, it is sufficient to set a value of 10.
4. Define the number of points in relation to the distance, the frequency divisor, the
velocity and the acceleration.
5. Define the velocity, acceleration and jerk time.
6. Define a typical motion distance.
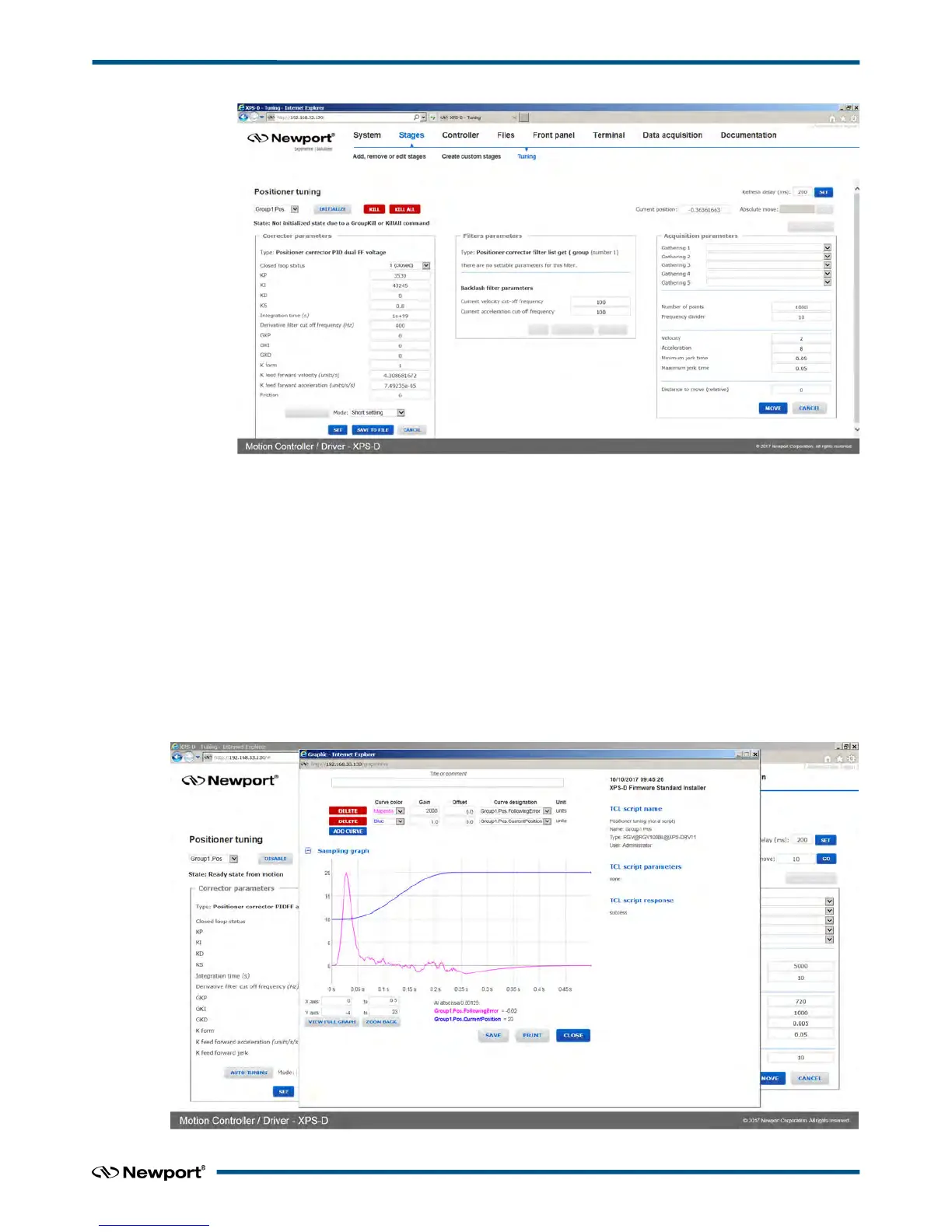
7. When done, click “MOVE”. The following page appears:
15 EDH0405En1012 – 09/18

 Loading...
Loading...










