4
䠇
䠉
䠇
䠇
䠉
䠇
䠉
䠇
䠇
䠇
䠇
䠇
䠉
Digitax SF Instruction Manual
7. Tuning
1. Introduction
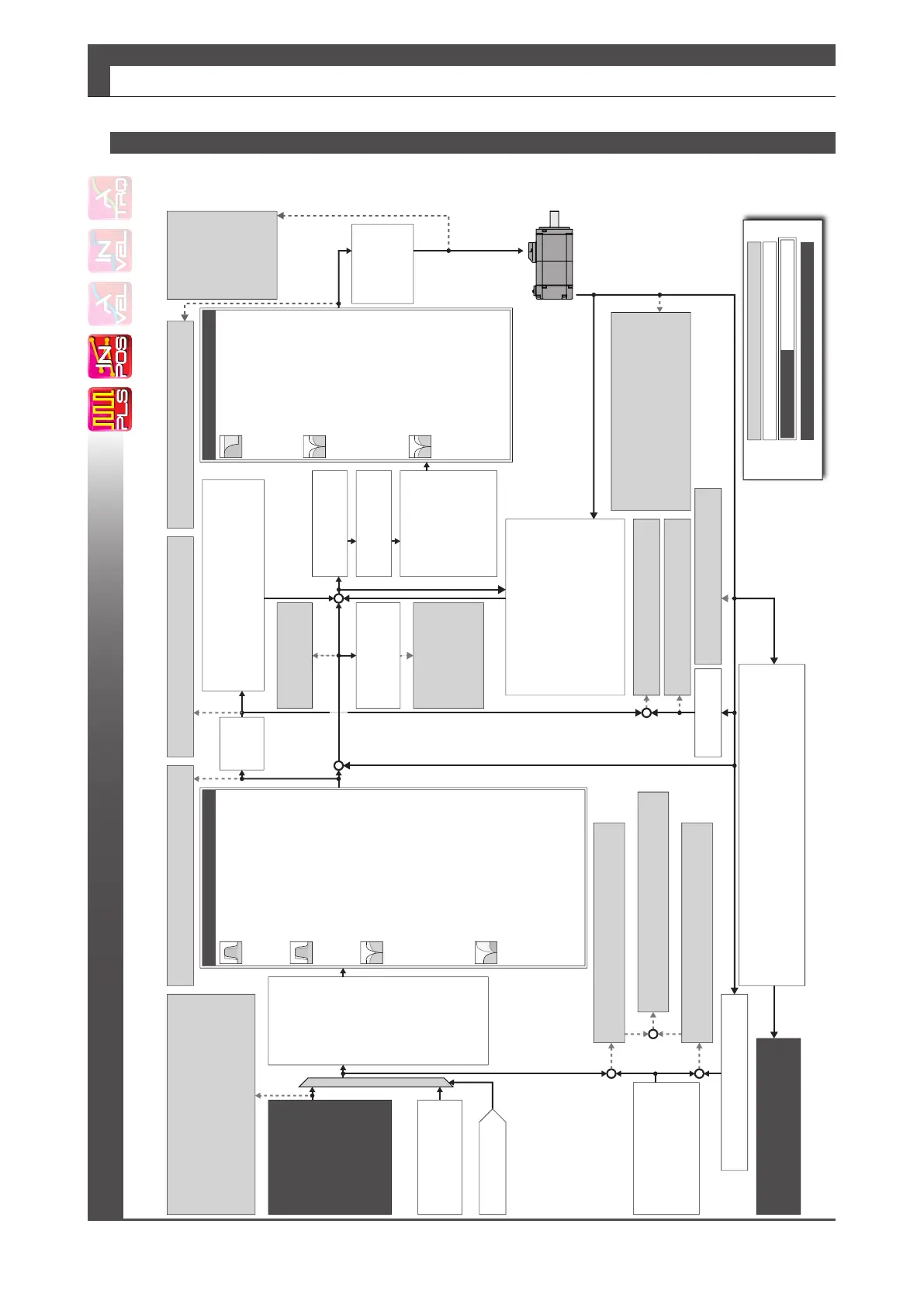
Position Control Mode
2� Control Block Diagram
131 Load factor
[digit]
113 Torque Command Value
[0�1% ]
97 Velocity command
[rpm]
65Position command
[Encoder pulse]
69 Position Error
[Encoder pulse]
78 Position
comman
d Error
[Command pulse]
99 Velocity Error
[rpm]
98 Velocity Feedback
[rpm]
67 Position Feedback
[Encoder pulse]
74 ABS Position Command
[Command pulse]
80 ABS Position error
[Command pulse]
76 ABS Position Feedback
[Command pulse]
194 1-rotation
[Encoder pulse]
195 integrated value
[Encoder pulse]
Encoder /Rotor mechanical angle
Low-pass lter
Notch lter
Inertia ratio
Torque command
limit
Notch lter 2
Enable Switch
160�0
Gain FF compensation 1
117�0
Enable Switch
160�1
102�0
Enable Switch
160�3
Enable Switch
144�0
Value 1
147�0
Value 2
148�0
Damping ratio
103�0
Numerator
34�0
Numerator
276�0
Operation Mode
642�0
Shift-to-home-position quantity
651�0
Home position data
653�0
3�0
Denominator
36�0
Denominator
278�0
Switch
32�2
Control gain 1
115�0
Control gain 2
116�0
Integral gain
119�0
Auto setting
160�2
Gain FF compensation 2
118�0
Frequency
168�0
Frequency
171�0
Time constant
162�0
Width
169�0
Width
172�0
Depth
170�0
Depth
173�0
Torque command lterPosition command lter
132
Load factor(%)
Digitax SF Connect
only)
[%]
Current control
Switch
193�0
Motor
Pulse train command
Encoder pulse output
Input pulse form
32.0
Rotational direction
32.1
Input logic
32.3
Input lter
33.0
35 Velocity
33 Position
[pulse/160µs] 50W ~ 750W
[pulse/200µs] 1kW ~ 2kW
[Command pulse]
Feedforward controller
Feedback controller
(Observer)
Position Command
Pulse Ratio Inverse
Transformation
Position Command
Pulse Ratio
Pulse train
command:
Interpolation
by pulse ratio
Velocity
Converter
Velocity
Detection
Legend
Status Number Status Name
Controller Block Associated Parameter
Filter Block
Associated Parameter
I/O Connector Block
Smoothing lter 1
Enable Switch
66.0
Moving average counter
80.0
Smoothing lter 2
Enable Switch
66.1
Enable Switch
66.0, 82.0, 82.1
Enable Switch
66.0, 82.0, 82.1
Moving average counter
81.0
Notch lter 1, 2, 3
γ - Notch lter 1, 2, 3
Frequency
74.0, 83.0, 357.0
Frequency
74.0, 83.0, 357.0
Width
75.0, 84.0, 358.0
High frequency gain
76.0, 85.0, 359.0
Depth
79.0, 86.0, 360.0
Depth
79.0, 86.0, 360.0
Pulse train command input
Internal Position
Homing
Command Mode
Rotational direction
272.1
Position Command
Pulse Ratio
Inverse Transformation
Encoder pulse output Division and multiplication
Inertia ratio upper limit
106�0