26
Digitax SF Instruction Manual
7. Tuning
3. Tuning Parameters
3. Tuning Parameters
1. Tuning
Function
To make the tuning operation easier, select the inertia condition suitable to your
equipment� The inertia conditions that you select will determine the Control Gain 1-2
combination and their ratio�
Parameter
113.1
Position Control Mode: Inertia conditions
Tuning Tip
Prioritize either stability or convergence according to the load and rigidity of your
equipment� Be aware of the trade-o between stability and convergence�
Settings Intended Use Eect
1
heavy-load, high uctuation equipment
low-rigid equipment
robot arms etc�
2
(Default)
(moderate setting)
general transport machines
3
light-load equipment
equipment that demands high-speed
operation or settling-required
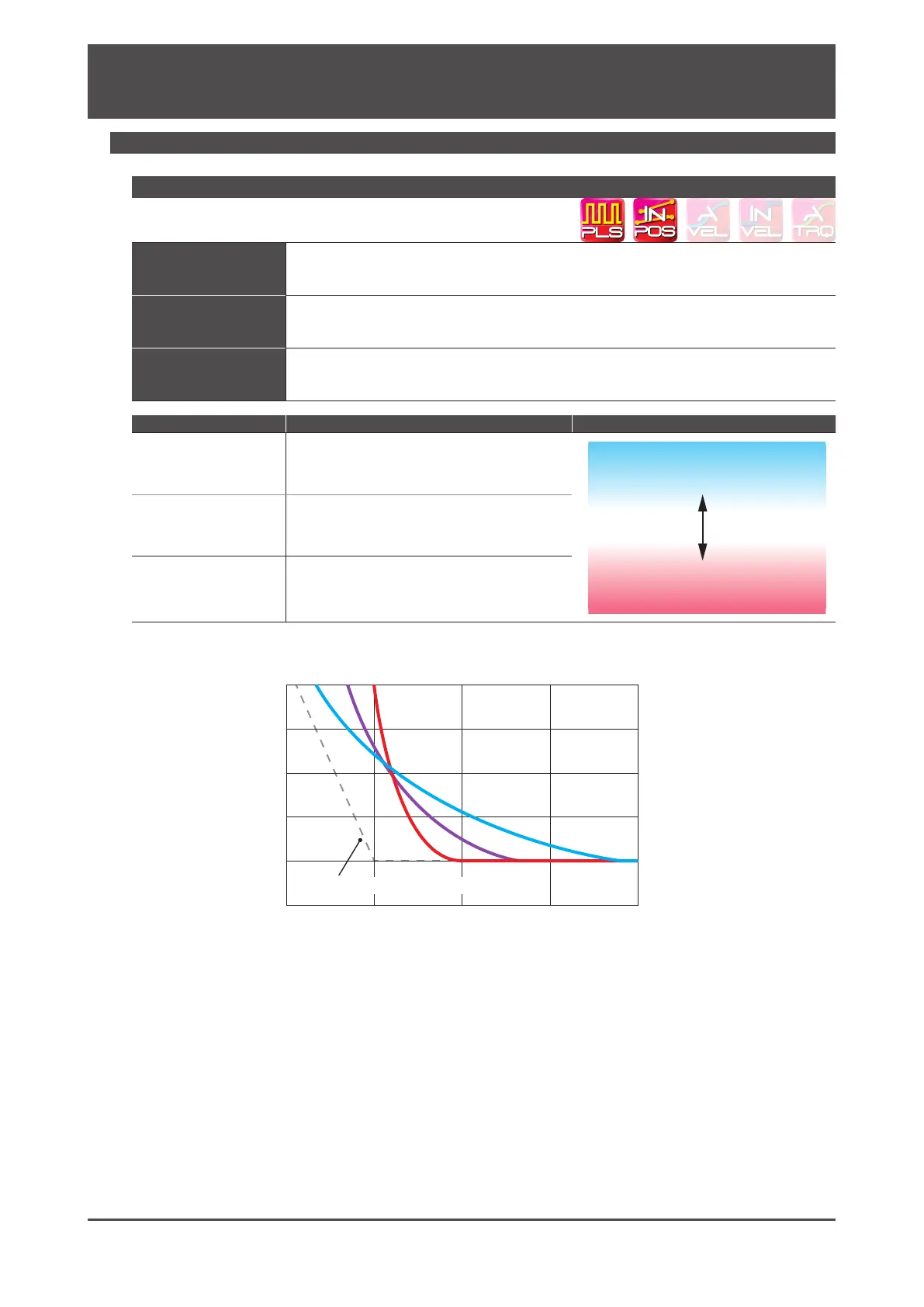
Dierence in convergence characteristics depending on the inertia condition settings
Speed command value
Position error
Inertia Condition
Better Stability
Better Convergence