217
PID Setting Level Section 5-6
These parameters set the PID constants for each PID set. When AT and ST
are executed, the parameters are set automatically.
Note If the settings for RT (robust tuning) are changed, the P (proportion-
al band), I (integral time), and D (derivative time) will be initialized.
■ Related Parameters
AT execute/cancel (adjustment level): Page 192
These parameters set the MV upper and lower limits for each PID set.
• The MV Upper Limit and MV Lower Limit parameters set the upper and
lower limits of the manipulated variable. When the calculated manipulated
variable exceeds the upper or lower limit value, the upper or lower limit
value will be the output level.
• MV limits do not operate when floating control is used with models that
support position-proportional control, so these parameters are disabled.
*.p PID * Proportional Band
*.i PID * Integral Time
2-PID control must be used.
*.d PID * Derivative Time (*: 1 to 8)
P action: For the P action, the MV is proportional to the derivative.
I action: For the I action, an output is produced that is proportional to the time
integral of the derivative. An offset normally occurs with the proportional
action, so the proportional action is used in combination with the inte-
gral action. As time passes, this offset disappears and the control tem-
perature comes to match the set point.
D action: For the D action, an output is produced that is proportional to the time
derivative of the input. Because the proportional action and integral
action correct for errors in the control result, the control system will be
slow to respond to sudden changes in temperature. The derivative
action performs a corrective action by increasing the MV in proportion to
the slope of the temperature change.
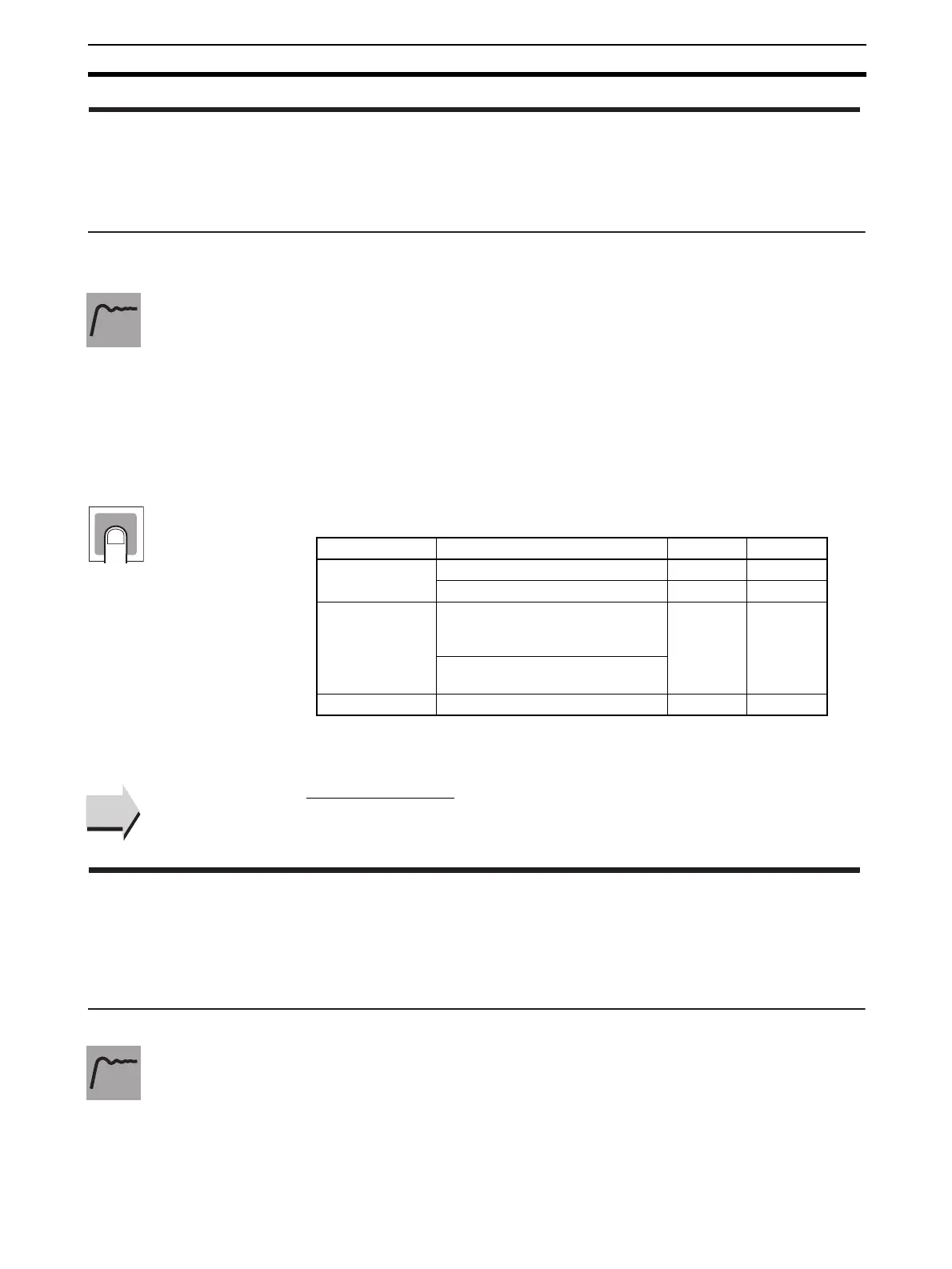
Parameter Setting range Unit Default
Proportional
Band
Temperature: 0.1 to 3,240.0 °C or °F8.0
Analog: 0.1 to 999.9 %FS 10.0
Integral Time Standard/heating and cooling,
position proportional (closed): 0.0
to 3,240.0
s 233.0
Position proportional (floating): 0.1
to 3,240.0
Derivative Time 0.0 to 3240.0 s 40.0
Function
Settin
See
See
*.olh PID * MV Upper Limit
2-PID control must be used.
The ST parameter must be set to
OFF.
Closed control must be used (for
position proportional models).
*.oll
PID * MV Lower Limit
(*: 1 to 8)
Function

 Loading...
Loading...











