When teaching positions to the robot, you must store the position data of the robot in the V+ position
variables. Here, create the following position variables.
Variable name Data type Application
Corresponding IEC
variable
gl.pick Location Has the data of workpiece pick-up position. eLoc_pick
gl.place Location Has the data of workpiece place position. eLoc_place
gl.wait Location Has the data of robot wait position. eLoc_wait
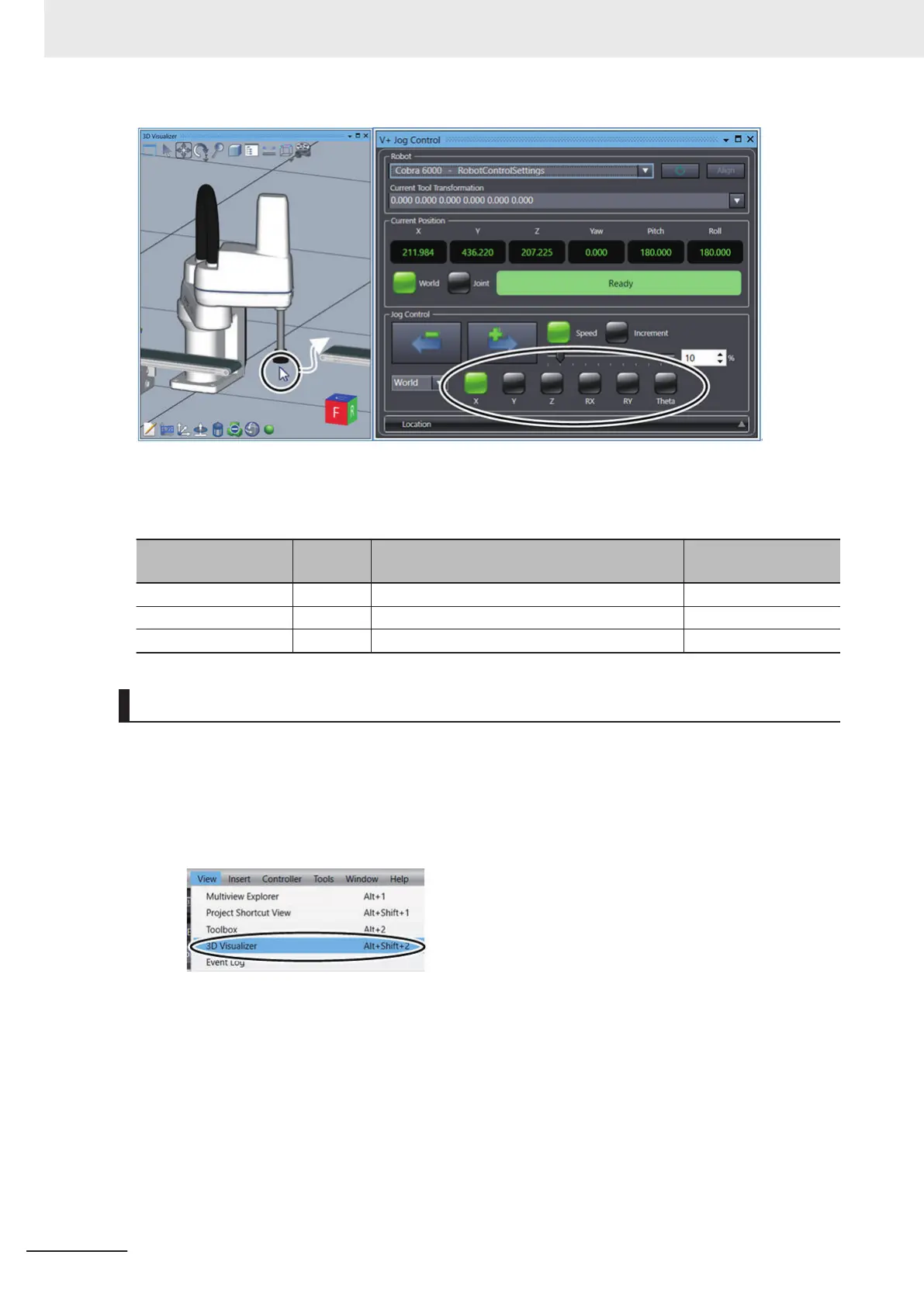
Manipulating the Robot with the Mouse in the 3D Visualizer
This section describes the procedure to manipulate the tool center point of the robot with the mouse in
the 3D Visualizer
. This operation is suitable for determining rough position and posture, because the
tool center point of the robot moves to follow the mouse cursor, enabling intuitive robotic operation.
1 Select 3D Visualizer
from the View menu on the main window of the Sysmac Studio.
The 3D Visualizer is displayed on the right side of the main window.
3 Implementation Example of Static Pick-and-place Equipment
3-58
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












