The Robot Integrated CPU Unit is now configured to automatically load the V+ programs and V+ glob-
al variables when it is powered ON. The program auto starts automatically when the Robot Integrated
CPU Unit is powered ON and reads the saved V+ programs and V+ global variables.
The program auto is created in a form called command program, which is different from the V+ pro-
gram. For details about the command program, refer to the eV+3 User's Manual (Cat. No. I651).
3-3-9
Running the Program and Checking Operation
This section describes the procedure to run and simulate the sequence control program created in
3-3-3
Creating a Sequence Control Program on page 3-
22.
You can run the program by changing the global variable gStart in the sequence control program from
FALSE to TRUE in the Watch Tab Page.
The V+ program is called from the sequence control program executed in this procedure.
Precautions for Correct Use
When you perform this procedure, check that the project file has been opened in EMULATION
mode. Refer to Enabling Robot Simulation Function on page 3-56 for the checking procedure.
When you control the operation with the V+ programs, start from step1.
To control the operation with the sequence control programs, start with step 6.
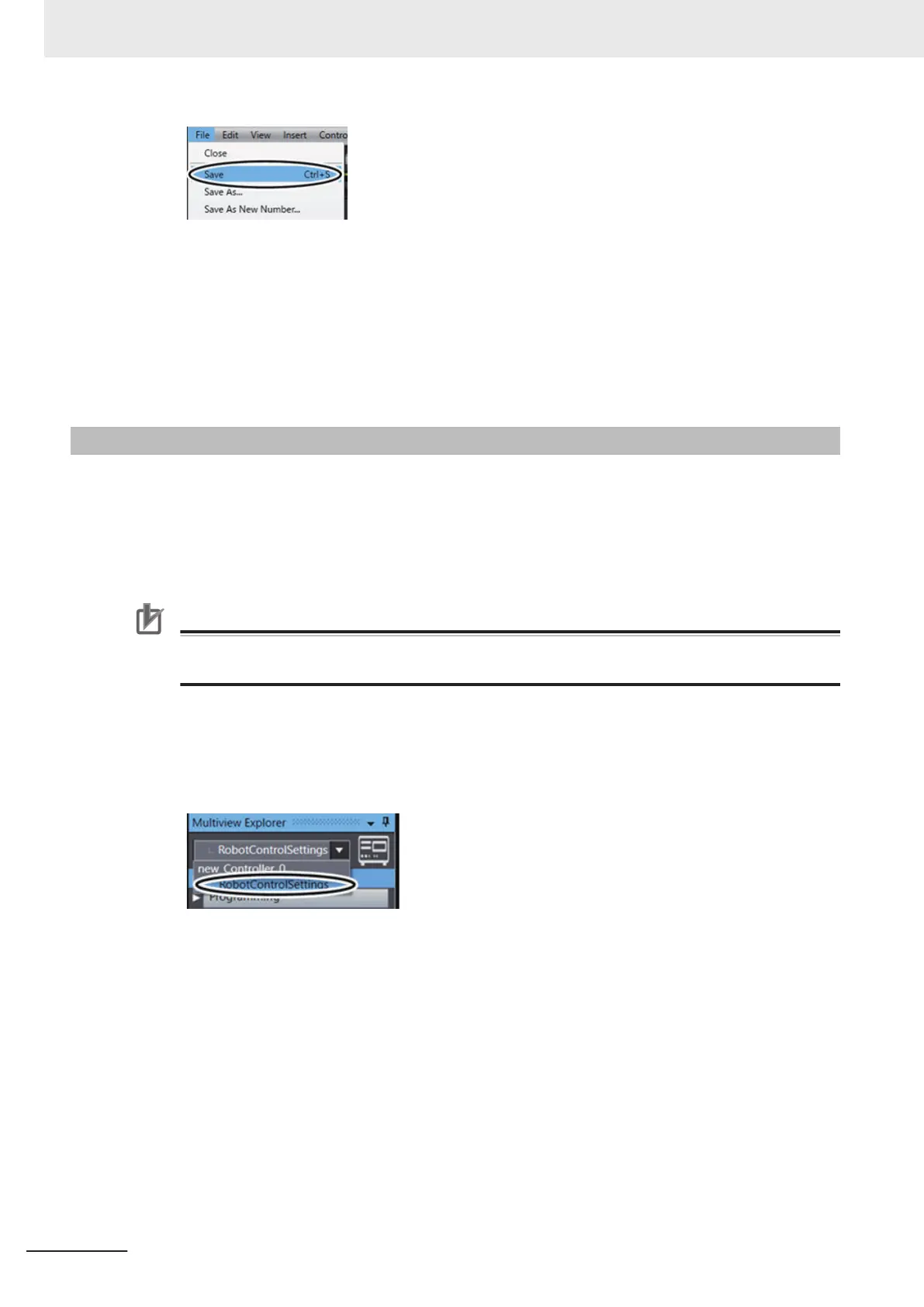
1 Select
RobotControlSettings from the device list in the Multiview Explorer
.
2 Select Task Status Control from the V
iew menu on the main window.
3 Implementation Example of Static Pick-and-place Equipment
3-70
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












