3-1
Program Specifications for Static
Pick-and-place Equipment
The program specifications are described if operations of static pick-and-place equipment are control-
led with the sequence control program and if the operations are controlled with the V+ program.
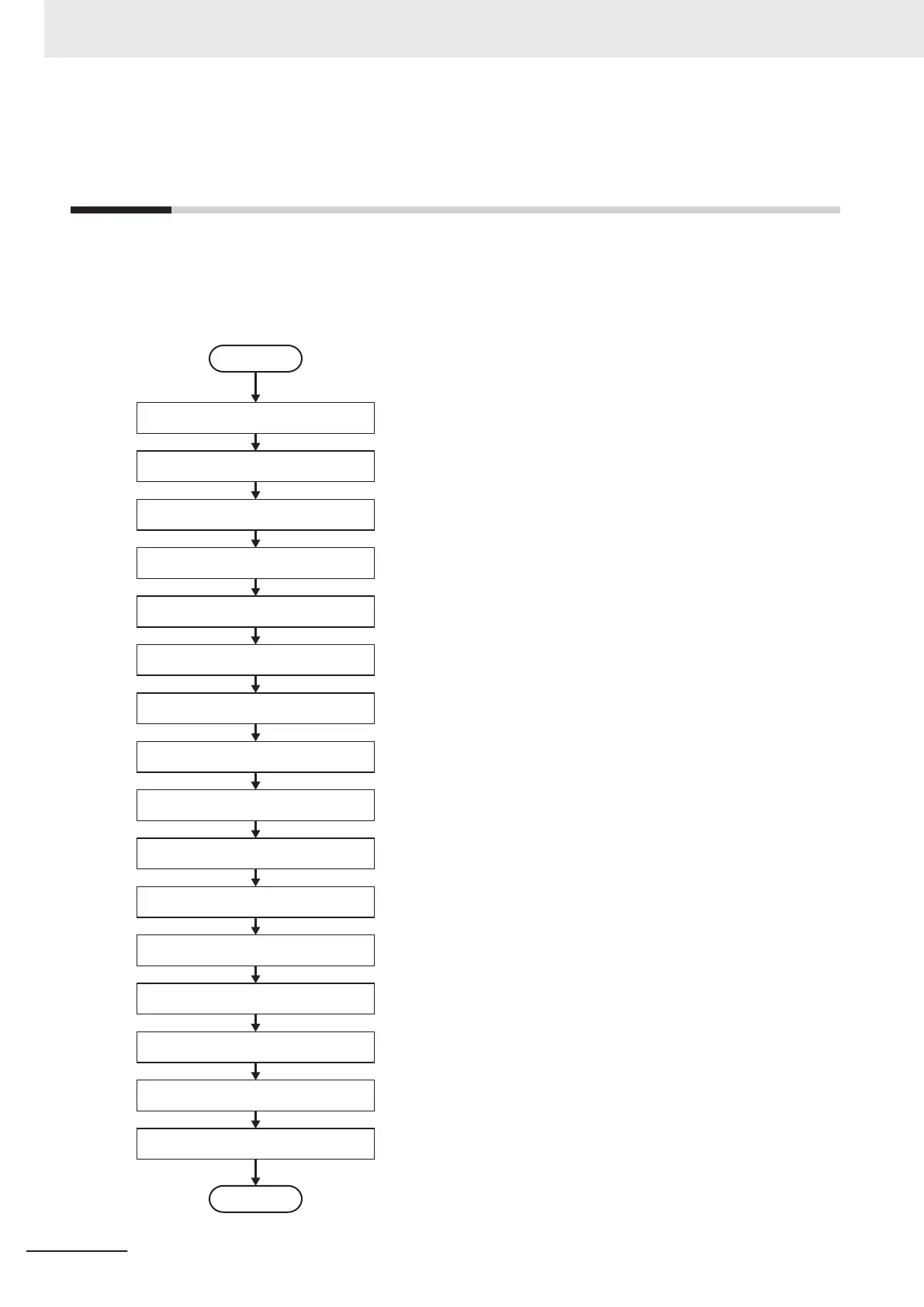
A flow chart of a program is given below. Refer to 1-3-1 Operating Specifications on page 1-5 for infor-
mation on the positions of P1 to P5 in the flow chart.
Robot calibration
Attach a robot
Move to P1
Stop vacuuming
Wait for a certain time
Move to P4
Move to P1
Detach the robot
Start
End
Move to P2
Move to P3
Start vacuuming
Move to P5
Move the robot to the height of P1
Wait for a certain time
Move to P2
Move to P4
3 Implementation Example of Static Pick-and-place Equipment
3-2
NJ-series Robot Integrated System Startup Guide (O049)

 Loading...
Loading...












