3-2
Basic Startup Procedures
This section gives an overview of the basic startup procedures to build a static pick-and-place system.
First, program a machine operation, configure and check the settings using the simulator, and then run
the system for fine-tuning the operation.
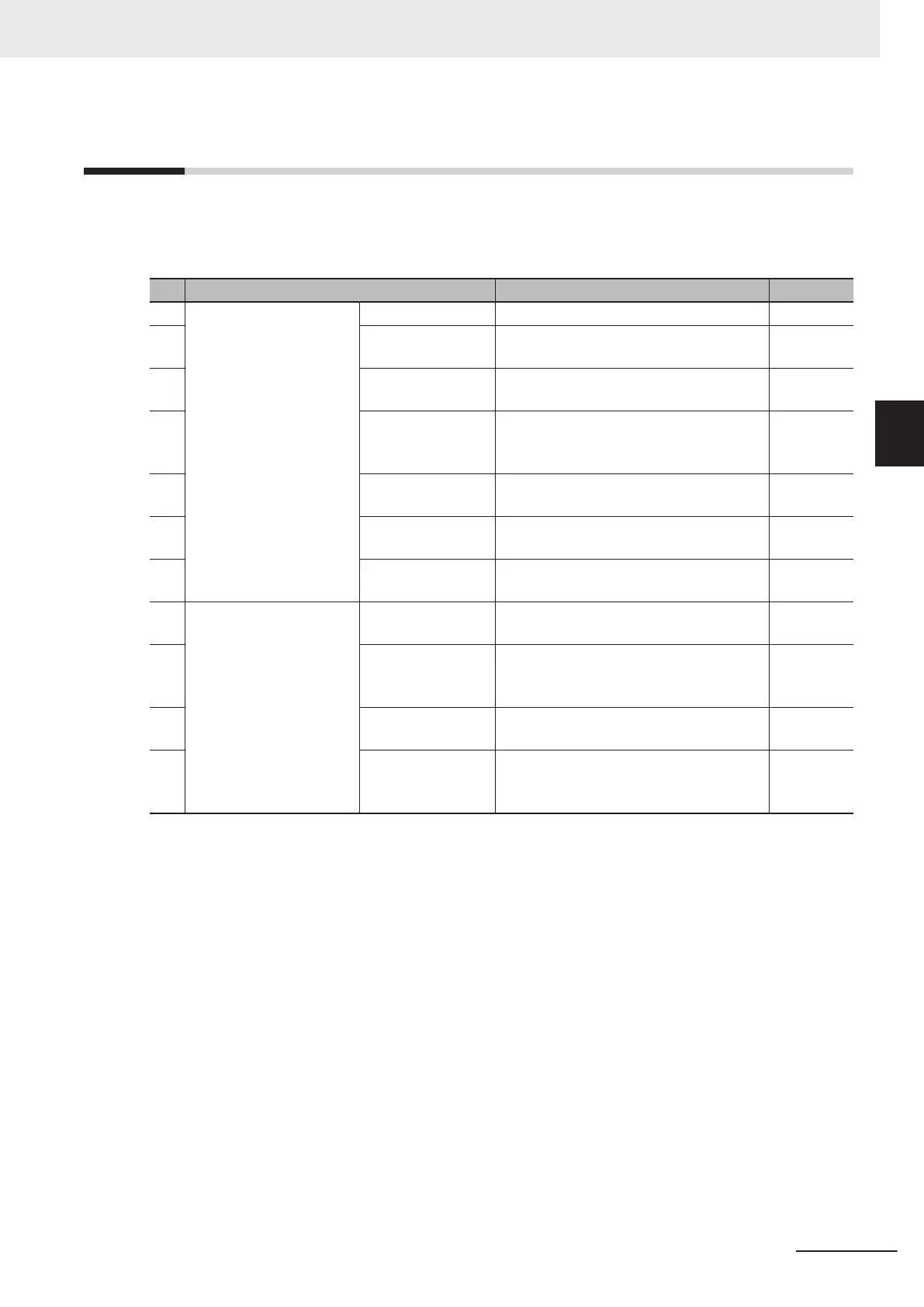
No. Procedure Description Reference
1 Programming and Simu-
lation Procedures
Creating a project Create a project file in the Sysmac Studio. page 3-18
2 Creating the net-
work configuration
Create the EtherCAT Network Configura-
tion and add a robot on the network.
page 3-19
3 Writing the pro-
grams
Create a sequence control program and V
+ programs.
page 3-22
page 3-
28
4 Placing 3D shape
data
Place 3D shape data and make the oper-
ating range of the robot visible on the 3D
Visualizer
.
page 3-34
5 Starting simulation Activate the simulation function and start
to simulate the robot motion.
page 3-56
6 Teaching (Simula-
tion)
Use the simulation function of the Sysmac
Studio for teaching the positions.
page 3-57
7 Running the pro-
gram (Simulation)
Run the sequence control program on the
simulator of the Sysmac Studio.
page 3-70
8 Setup Procedure for Ac-
tual System
Going online Place the Sysmac Studio online with the
Robot Integrated CPU Unit.
page 3-75
9 Transferring set-
tings and programs
Download the programs and settings in
the Sysmac Studio project file to the Ro-
bot Integrated CPU Unit.
page 3-77
10 Teaching (On the
actual equipment)
Operate the robot to check and correct
the teaching data.
page 3-80
11 Running the pro-
grams (On actual
equipment)
Let the robot operate automatically ac-
cording to the programs.
page 3-91
3 Implementation Example of Static Pick-and-place Equipment
3-17
NJ-series Robot Integrated System Startup Guide (O049)
3-2 Basic Startup Procedures
3

 Loading...
Loading...












