12 Troubleshooting and Maintenance
12-26
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
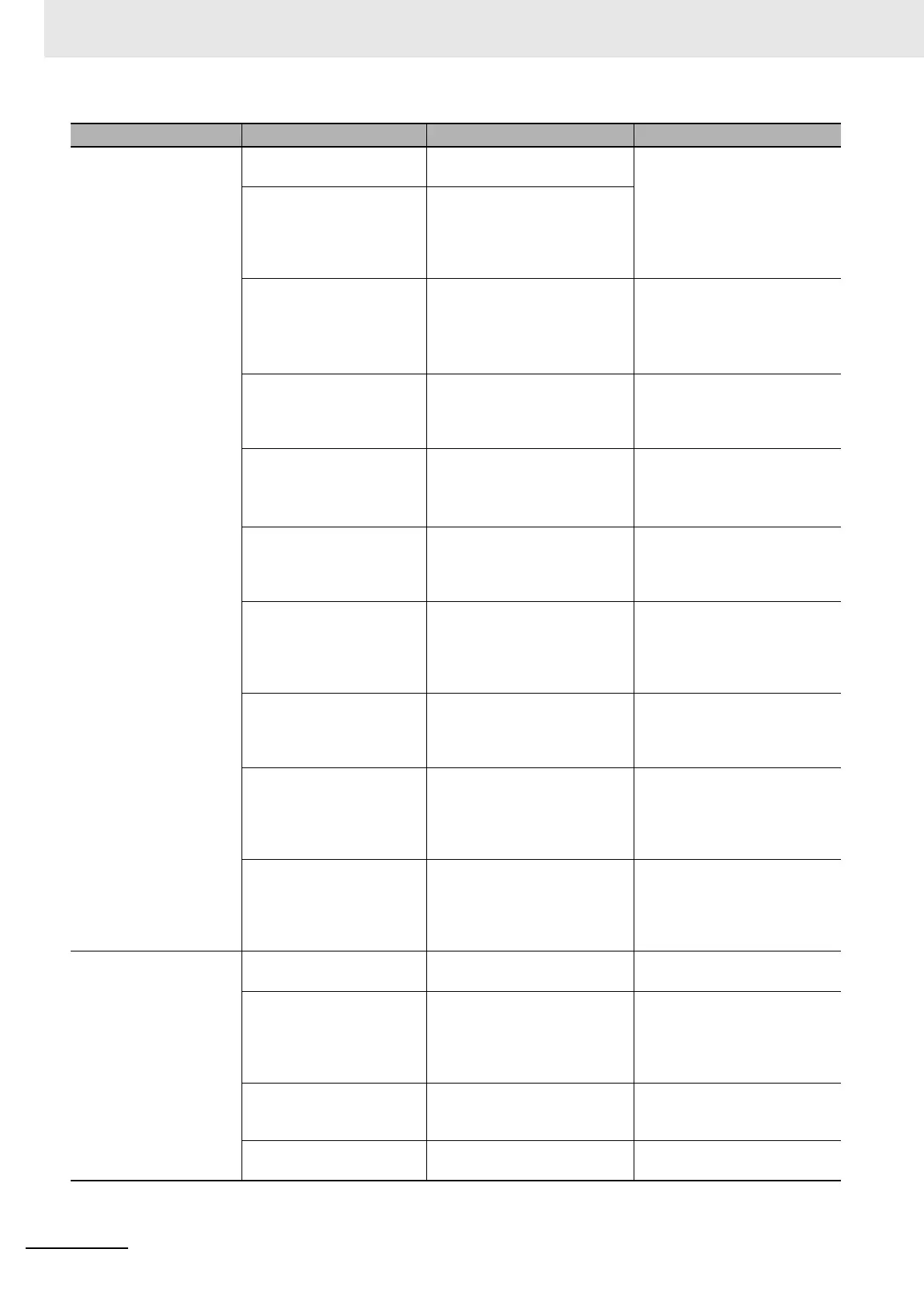
The Linear Motor or the
load generates abnormal
noise or vibration.
The Position Loop Gain 1
(3100 hex) is too large.
Review the setting of object
3100 hex.
Use the CX-Drive or the analog
monitor to measure the
response and adjust the gain.
The Speed Loop Gain 1
(3101 hex) and the Speed
Loop Integral Time
Constant 1 (3102 hex) are
balanced incorrectly.
Review the set values of
objects 3101 hex and
3102 hex.
Noise is entering into the
control I/O signal cable
because the cable does not
meet specifications.
Check to see if the cable is a
twisted-pair cable or shielded
twisted-pair cable with core
wires that are at least 0.08 mm
dia.
Use a control I/O signal cable
that meets specifications.
Noise is entering into the
control I/O signal cable
because the cable is longer
than the specified length.
Check the length of the control
I/O signal cable.
Shorten the control I/O signal
cable to 3 m or less.
Noise is entering into the
cable because the external
encoder cable does not
meet specifications.
Check to see if it is a shielded
twisted-pair cable with core
wires that are at least 0.12 mm
dia.
Use an external encoder cable
that meets specifications.
Noise is entering into the
external encoder cable
because the cable is longer
than the specified length.
Check the length of the
external encoder cable.
Shorten the external encoder
cable to less than 50 m.
Noise is entering into the
signal lines because the
external encoder cable is
stuck or the sheath is
damaged.
Check the external encoder
cable for damage.
Correct the external encoder
cable's pathway.
Excessive noise on external
encoder cable.
Check to see if the external
encoder cable is bound
together with or too close to
high-current lines.
Install the external encoder
cable where it won't be
subjected to surges.
The FG's potential is
fluctuating due to devices
near the Linear Motor, such
as welding machines.
Check for ground problems
(loss of ground or incomplete
ground) at equipment such as
welding machines near the
Linear Motor.
Ground the equipment properly
and prevent current from
flowing to the external encoder
FG.
Errors are being caused by
excessive vibration or shock
on the external encoder.
There are problems with
mechanical vibration or motor
installation (such as the
precision of the mounting
surface or attachment).
Reduce the mechanical
vibration or correct the Linear
Motor's installation.
Overshooting at startup
or when stopping
The Position Loop Gain 1
(3100 hex) is too large.
Review the setting of object
3100 hex.
Adjust the gain to prevent
overshooting.
The Speed Loop Gain 1
(3101 hex) and the Speed
Loop Integral Time
Constant 1 (3102 hex) are
balanced incorrectly.
Review the set values of
objects 3101 hex and
3102 hex.
Use the CX-Drive or the analog
monitor to measure the
response and adjust the gain.
The machine rigidity set by
realtime autotuning is
incorrect.
Review the setting of the
machine rigidity.
Match the machine rigidity
setting to the load rigidity.
The set mass ratio differs
from the load.
Review the set value of the
Mass Ratio (3004 hex).
Adjust the set value of object
3004 hex with the load.
Symptom Probable cause Items to check Measures

 Loading...
Loading...

