3-25
3 Specifications
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
3-2 Overload Characteristics (Electronic Thermal
Function)
3
3-2 Overload Characteristics (Electronic
Thermal Function)
An overload protection function (electronic thermal) is built into the Servo Drive to protect the drive and
linear motor from overloading.
Overload protection will be activated according to the timing characteristic if the feedback value for the
force command exceeds the overload level.
Set the overload level in the Overload Detection Level Setting (3512 hex) and the timing characteristic
in the Motor Overload Curve Selection (3929 hex), respectively. Be sure that these settings conform to
the environment in which the Servo Drive is used.
If an overload does occur, first eliminate the cause of the error and then wait at least 1 minute for the
motor temperature to drop before turning ON the power again.
If the error reset is repeated at short intervals, the motor may burn out.
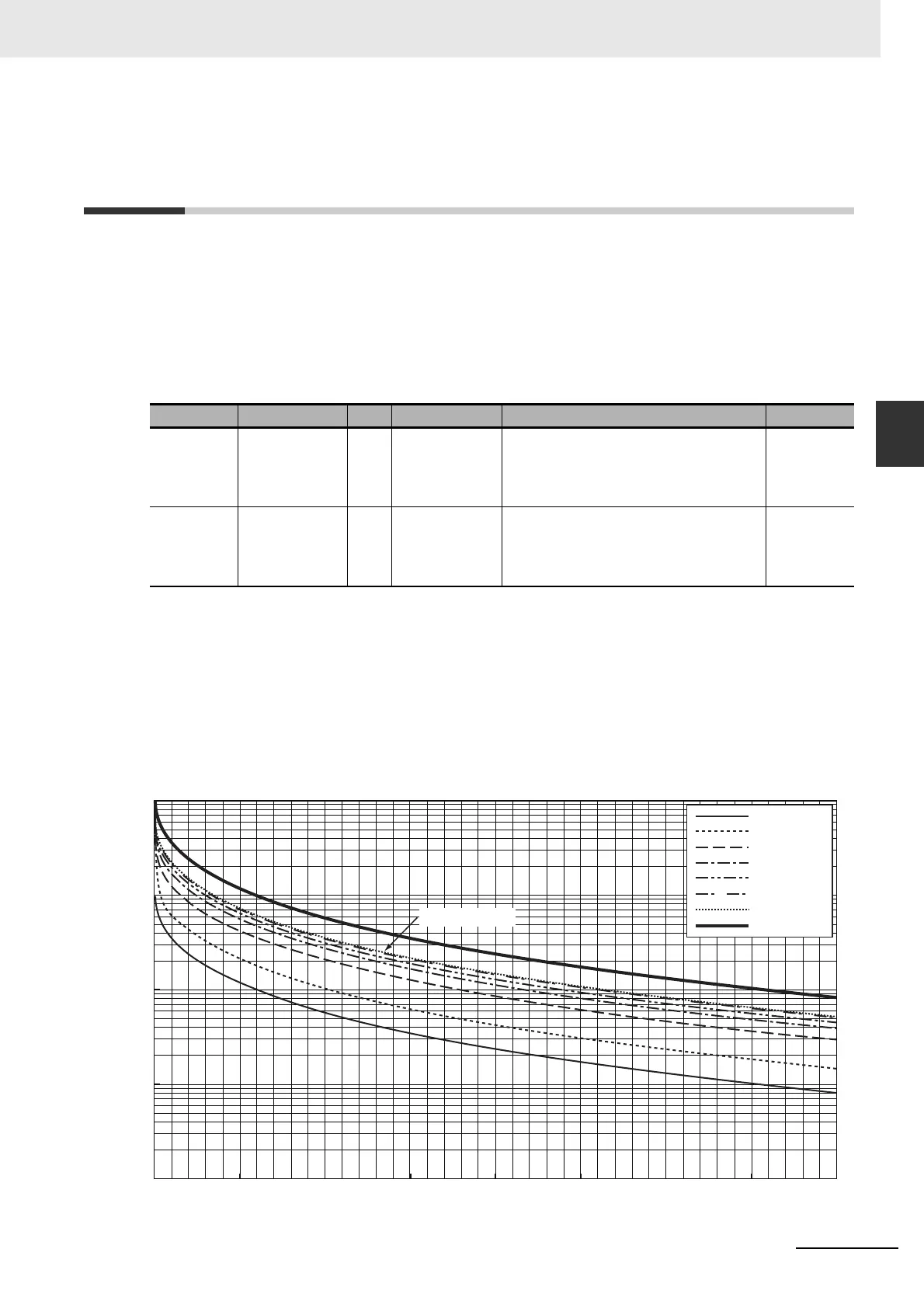
The following graphs show the motor overload characteristic curves that can be selected in the Motor
Overload Curve Selection (3929 hex), where the horizontal axis represents the load ratio and the
vertical axis represents electronic thermal operation time.
When Overload Detection Level Setting is 100%
Index Name Unit Setting range Explanation Reference
3512 hex Overload
Detection Level
Setting
% 0 to 500 Set the overload detection level.
If set to 0, the overload level will be
115%. If set to 115 or higher, this will be
restricted internally to 115%.
page 9-39
3929 hex Motor Overload
Curve
Selection
0 to 7 Select one of the eight motor overload
characteristic curves.
If set to 0, the standard motor overload
characteristic curve will be selected.
page 9-64
115
100 150 200 250 300 350 400 450 500
0.1
1
10
100
1000
3929 hex=0
3929 hex=1
3929 hex=2
3929 hex=3
3929 hex=4
3929 hex=5
3929 hex=6
3929 hex=7
3929 hex=5, 6
Time [s]
Force [%]

 Loading...
Loading...

