7-23
7 Applied Functions
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
7-7 Force Limit Switching
7
7-7-2 Objects Requiring Settings
*1 Read the word "torque" as "force" when using these objects.
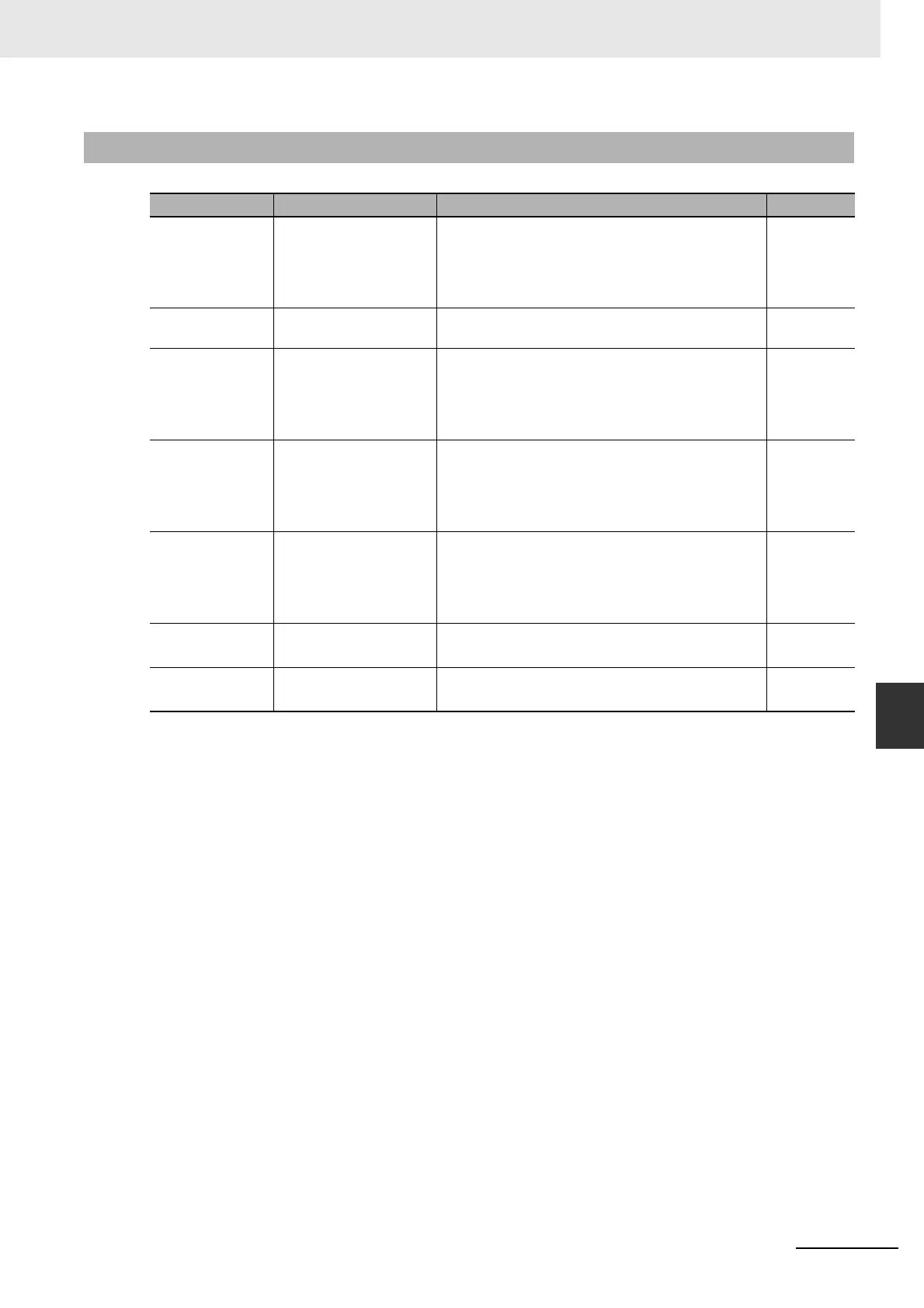
7-7-2 Objects Requiring Settings
Index Name Explanation Reference
3013 hex Force Limit 1 Set the first force limit value of the motor output
force.
The upper limit of the set value is restricted based
on the maximum force of the motor being
connected.
page 9-5
3521 hex Force Limit Selection Set the force limit selection method. page 9-41
3522 hex Force Limit 2 Set the second force limit value of the motor output
force.
The upper limit of the set value is restricted based
on the maximum force of the motor being
connected.
page 9-42
3525 hex Force Limit 3 Set the third force limit value of the motor output
force.
The upper limit of the set value is restricted based
on the maximum force of the motor being
connected.
page 9-42
3526 hex Force Limit 4 Set the fourth force limit value of the motor output
force.
The upper limit of the set value is restricted based
on the maximum force of the motor being
connected.
page 9-42
60E0 hex Positive torque limit
value
*1
Set the Positive Force Limit value of the motor
output force.
page A-68
60E1 hex Negative torque limit
value
*2
Set the Negative Force Limit value of the motor
output force.
page A-69

 Loading...
Loading...

