9-41
9 Servo Parameter Objects
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
9-6 Extended Objects
9
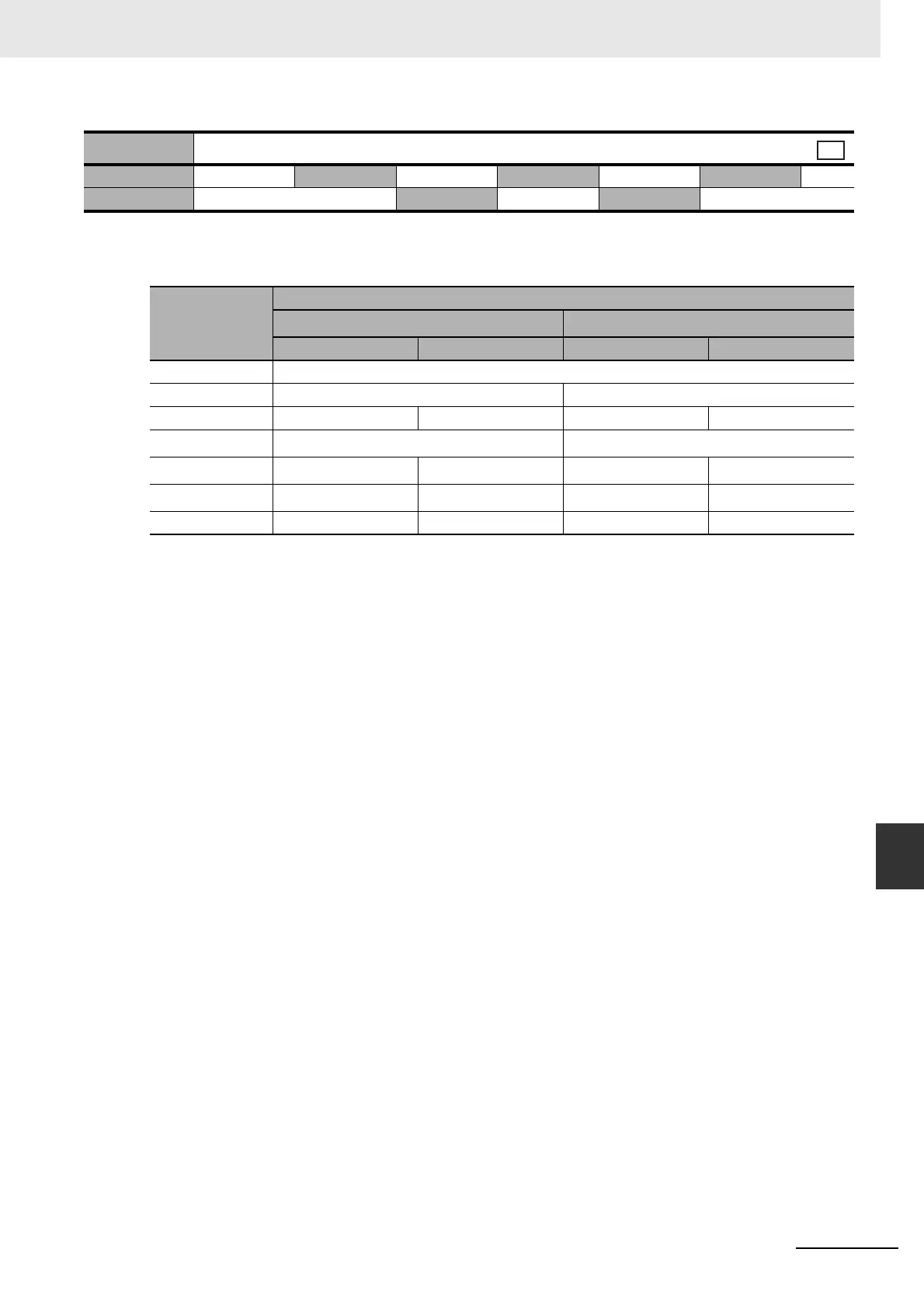
• Select the method to set the positive and negative force limits.
Explanation of Settings
*1 PCL ON is the state in which either the Positive Force Limit Input (PCL) or the EtherCAT communications
torque control command (P-CL) is ON; PCL OFF is the state in which both of these are OFF.
*2 NCL ON is the state in which either the Negative Force Limit Input (NCL) or the EtherCAT communications
torque control command (N-CL) is ON; NCL OFF is the state in which both of these are OFF.
*3 The smaller of 60E0 hex or 3013 hex is used.
*4 The smaller of 60E1 hex or 3522 hex is used.
• When this object is set to 0 or 1, the Positive and Negative Force Limit Inputs are restricted by the
Positive torque limit value (60E0 hex).
Refer to 7-7 Force Limit Switching on page 7-22.
3521 hex
Force Limit Selection
Setting range 0 to 7 Unit
Default setting
6
Data attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
Set value
Position control/speed control/force control
Positive Direction Force Limit
*1
Negative Direction Force Limit
*2
PCL ON PCL OFF NCL ON NCL OFF
0,1 3013 hex
2 3013 hex 3522 hex
3 3522 hex 3013 hex 3522 hex 3013 hex
4
60E0 or 3013 hex
*3
60E1 or 3522 hex
*4
5
60E0 or 3013 hex
*3
3013 hex
60E1 or 3522 hex
*4
3522 hex
6 3525 hex
60E0 or 3013 hex
*3
3526 hex
60E1 or 3522 hex
*4
7 3013 hex 3525 hex 3522 hex 3526 hex

 Loading...
Loading...

