9 Servo Parameter Objects
9-40
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
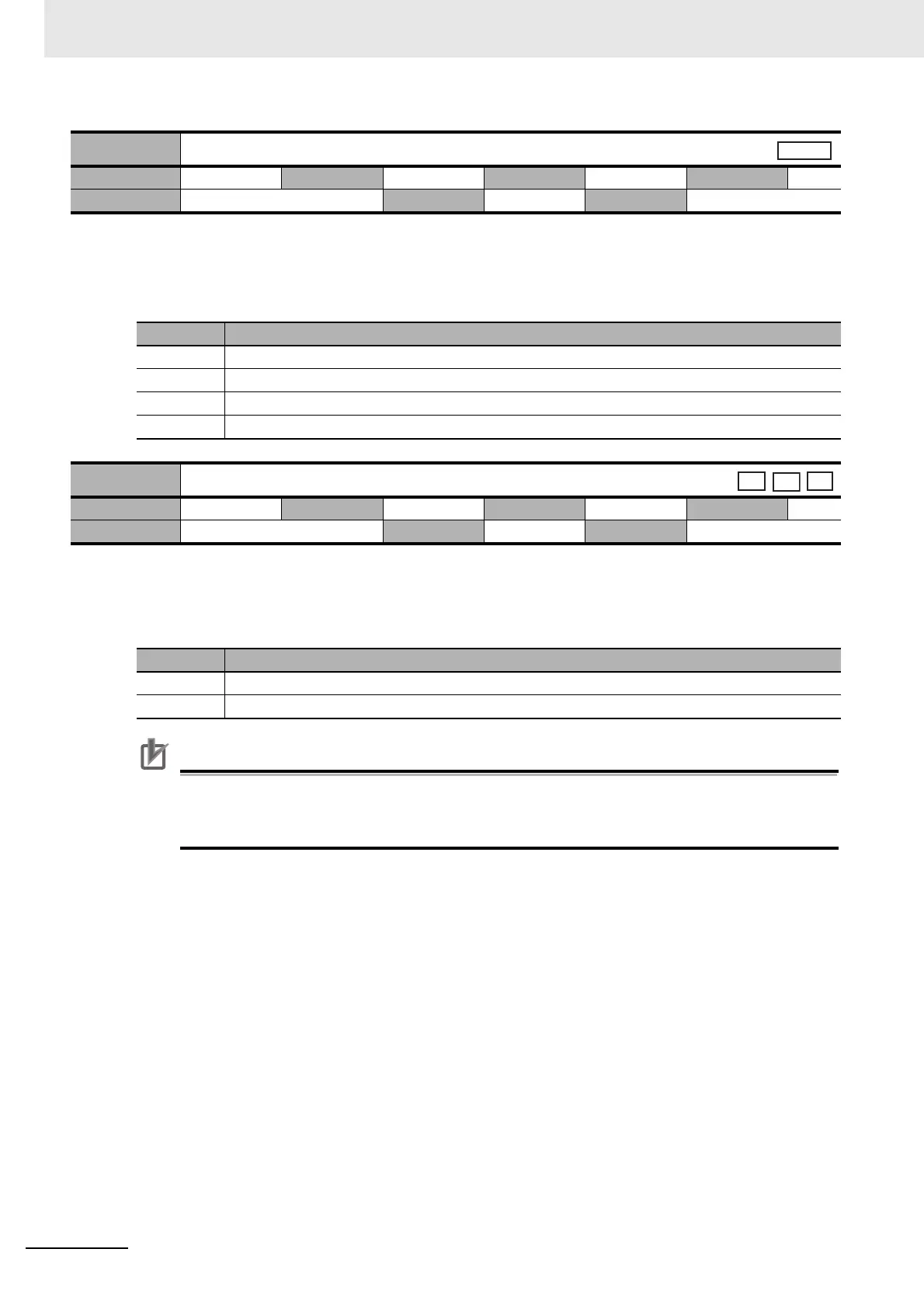
• Select the signal read cycle for control input (digital input).
• The External Latch Inputs 1, 2 and 3 (EXT1, 2, and 3) are excluded.
Explanation of Settings
• Select the setting unit of Position window (6067 hex), Position Completion Range 2 (3442 hex) and
Following error window (6065 hex).
Explanation of Settings
Precautions for Correct UsePrecautions for Correct Use
• Detection of the Positioning Completed status in EtherCAT communications is always
performed using command units, regardless of the setting on this object.
• Normally, use the default setting of 0 (command units).
3515 hex
Control Input Signal Read Setting
Setting range 0 to 3 Unit
Default setting
0
Data attribute
C
Size 2 bytes (INT16) Access RW PDO map Not possible.
Set value Description
0 0.250 ms
1 0.500 ms
2 1.5 ms
3 2.5 ms
3520 hex
Position Setting Unit Selection
Setting range 0 to 1 Unit
Default setting
0
Data attribute
C
Size 2 bytes (INT16) Access RW PDO map Not possible.
Set value Description
0 Command units
1 External encoder units

 Loading...
Loading...

