4-203
4-4 Communication Function
4
Functions
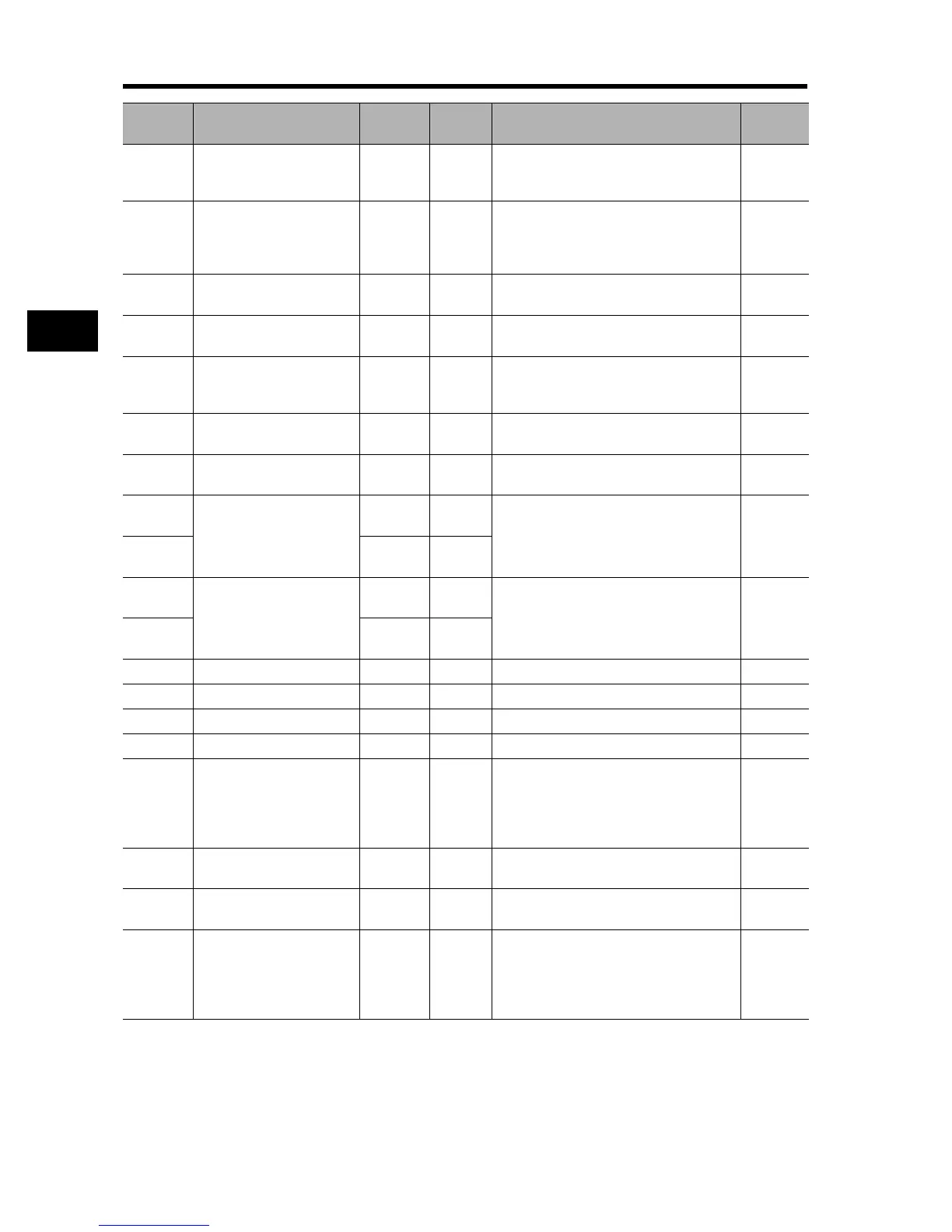
1620h
Orientation stop position
input type
P032 R/W
0: Digital Operator
1: Option 1
2: Option 2
1621h
Torque reference input
selection
P033 R/W
0: Terminal O
1: Terminal OI
2: Terminal O2
3: Digital Operator
1622h Torque reference setting P034 R/W
0 to 200 (0.4 to 55 kW)
0 to 180 (75 to 132 kW)
1 [%]
1623h
Polarity selection at torque
reference via O2
P035 R/W
0: As per sign
1: Depends on the RUN direction
1624h Torque bias mode P036 R/W
0: Disabled
1: Digital Operator
2: Input via terminal O2
1625h Torque bias value P037 R/W
-200 to +200 (0.4 to 55 kW)
-180 to +180 (75 to 132 kW)
1 [%]
1626h
Torque bias polarity
selection
P038 R/W
0: As per sign
1: Depends on the RUN direction
1627h
Speed limit value in torque
control (forward)
P039
(HIGH)
R/W
0 to 1st max. frequency 0.01 [Hz]
1628h
P039
(LOW)
R/W
1629h
Speed limit value in torque
control (reverse)
P040
(HIGH)
R/W
0 to 1st max. frequency 0.01 [Hz]
162Ah
P040
(LOW)
R/W
162Bh Not used
162Ch Not used
162Dh Not used
162Eh Not used
162Fh
Operation setting at
communication error
P045 R/W
0: Trip
1: Trip after deceleration stop
2: Ignore
3: Free run
4: Deceleration stop
1630h
Output assembly instance
No. setting
P046 R/W 20/21/100
1631h
Input assembly instance
No. setting
P047 R/W 70/71/101
1632h
Operation setting at idle
mode detection
P048 R/W
0: Trip
1: Trip after deceleration stop
2: Ignore
3: Free run
4: Deceleration stop
Register
No.
Function name
Function
code
R/W Monitor and setting parameters
Resolution