Examples and tips
PROGRAMMING MANUAL 256
Revision 1.0
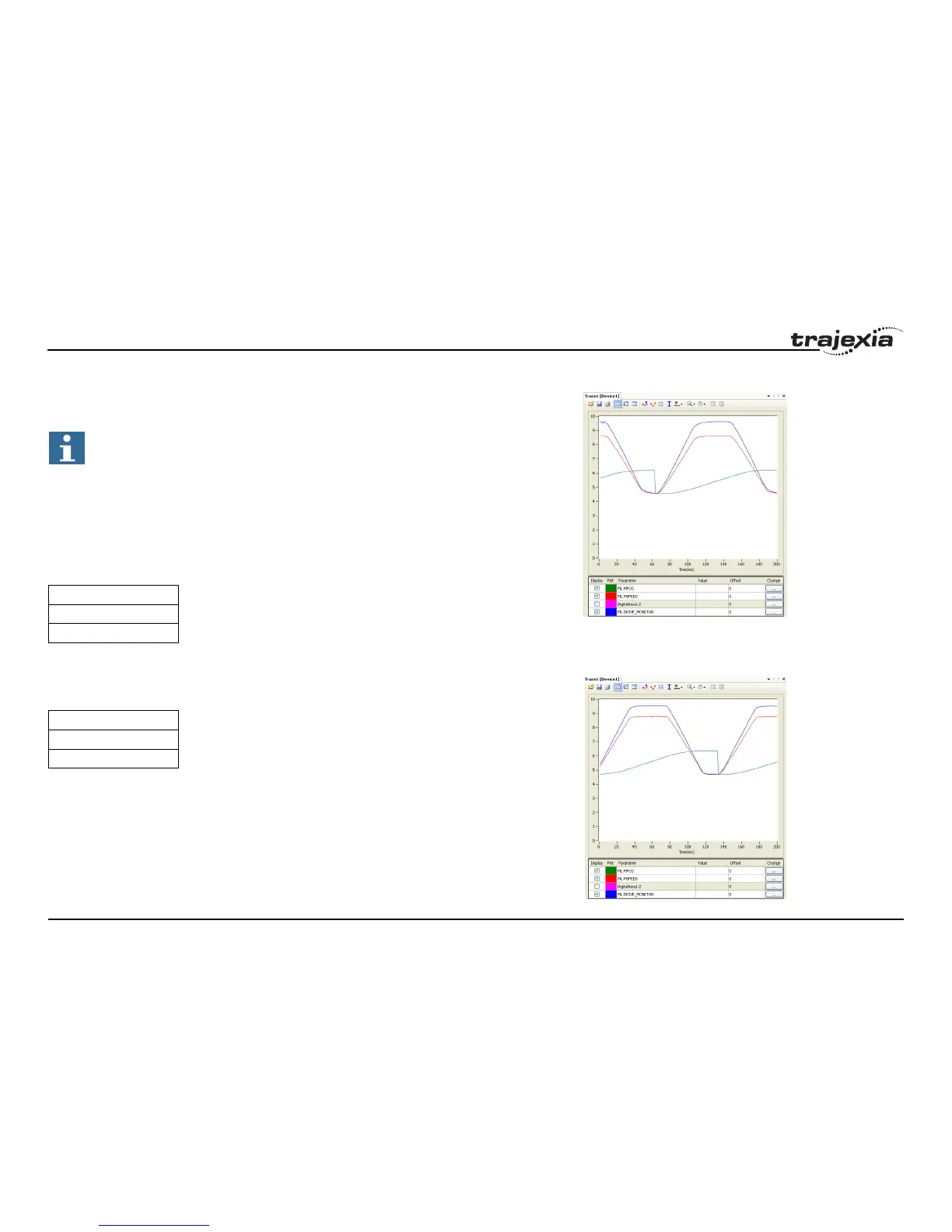
Example 1
fig. 13
The Following Error is proportional to the speed. There is a "soft profile" due
to the low rigidity setting (low gain).
The parameter values for the example are:
/i
Example 2
fig. 14
The Following Error reduces as the rigidity increases.
The parameter values for the example are:
/i
Note
The colours and scale of the oscilloscope for position mode are as
follows:
Red: MSPEED (Measured Axis speed). Units is 50 units/ms/divi-
sion
Blue: DRIVE_MONITOR (set as Following Error in the Servo
Driver). Units is depending on the graph
Green: MPOS (Measured Axis position). 50000 units/division
Motion Parameter values
Fn001=4
Pn109=0
Motion Parameter values
Fn001=6
Pn109=0