Examples and tips
PROGRAMMING MANUAL 267
Revision 1.0
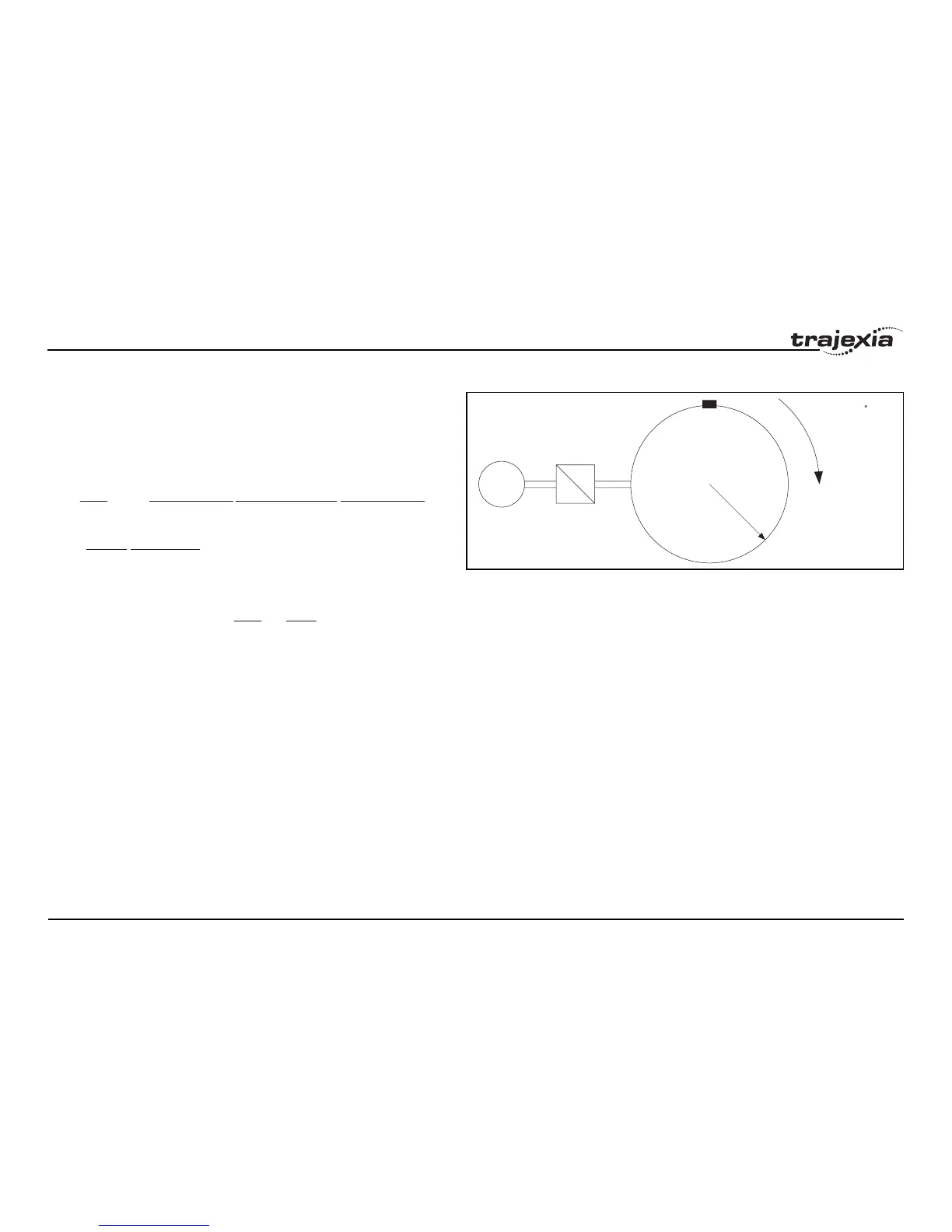
Example 4
fig. 22
The mechanical system uses a servo motor with a 17-bit absolute encoder.
The mechanical gear ratio of the gearbox is 1:12.24. The mechanical
measurement units must be tenths of an angle degree. Therefore the total
repeat distance for the full turn of the moving part is 3600 tenths of an angle
degree.
With the same procedure as in example 1, we have:
Therefore:
One solution is:
Because the greatest common divisor of Pn202 and Pn203 must be 1, we
get: Pn202 = 17 and Pn203 = 500. Therefore, the parameters are:
To calculate the multiturn limit setting Pn205, we have:
1:12.24 Gear
17-bit absolute
encoder
M
r
Full turn = 360 =
3600 x tenth of degree
Pn202
Pn203
UNITS =
2
17
encoder_counts
1 motor_revolution
1 machine_revolution
12.24 motor_revolution
3600 tenth of degree
1 pulley_revolution
3600
2 12.24
encoder_counts
=
tenth of degree
=
.
.
.
..
.
17
Pn202
Pn203
UNITS =
= 2
1224
360000
17
UNITS = 2 = 131072
Pn202 = 1224
Pn203 = 360000
17
UNITS = 131072
Pn202 = 17
Pn203 = 500
Pn205 = 16
REP_DIST = 3600
REP_OPTION = 1
m motor_revolution = n machine_cycle = n 12.24 motor_revolution
....